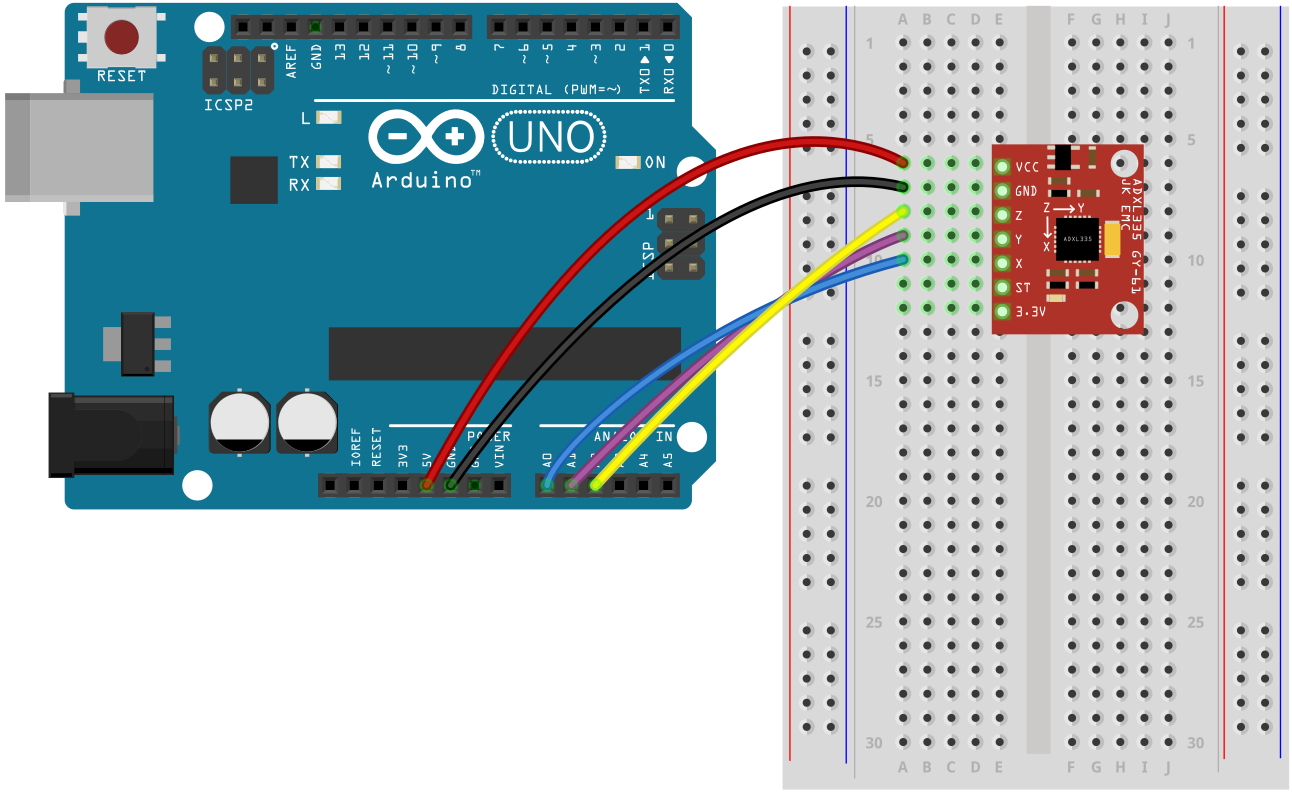
(1) 아두이노 UNO R3와 연결해서 가속도, 자이로 센터 데이터 출력 하기
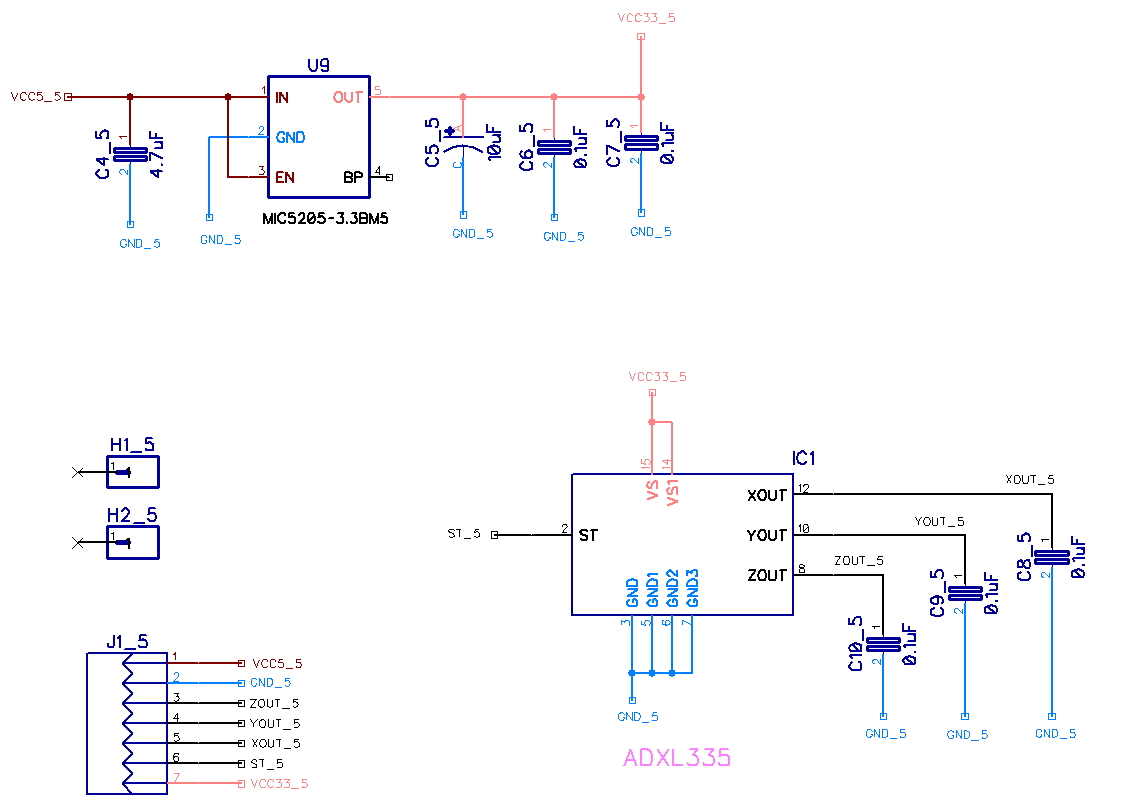
X축<->A0,
Y축<->A1, Z축<->A2 와 연결한다. 본 제품은 내부에 회로적으로 3.3V전원
레듈레이터와 I2C 레벨쉬프터를 내장하고 있어서 5.0V와 3.3V 에서 모두 사용이 가능 하다. STM32, 라즈베리파이 등과
같이 3.3V 전원을 사용하는 프로세서에서 사용할 경우에는 VCC 대신에 3.3V 핀을 통해서 전원을 바로 연결해 주면 된다.
// Maurice Ribble // 6-28-2009 // http://www.glacialwanderer.com/hobbyrobotics // This app just probes two external sensors (ADXL330 and IDG300) and // then sends that data over a serial connection. I used a sparkfun // breakout board to make using these chips easier. // http://www.sparkfun.com/commerce/product_info.php?products_id=741 // I wrote a processing.org app that reads in this data and graphs it // on a pc. #define X_ACCEL_APIN 0 #define Y_ACCEL_APIN 1 #define Z_ACCEL_APIN 2 //#define V_REF_APIN 3 //#define Y_RATE_APIN 4 //#define X_RATE_APIN 5 voidsetup() { Serial.begin(115200); } // If this is defined it prints out the FPS that we can send a // complete set of data over the serial port. //#define CHECK_FPS voidloop() { int xAccel=0, yAccel=0, zAccel=0; // , vRef=0, xRate=0, yRate=0; unsignedint startTag =0xDEAD; // Analog port maxes at 1023 so this is a safe termination value int loopCount; #ifdef CHECK_FPS unsignedlong startTime, endTime; startTime = millis(); #endif // Can't do more than 64 loops or could overflow the 16 bit ints // This just averages together as many sensor reads as we can in // order to reduce sensor noise. Might want to introduce add // a smarter filter her in the future. loopCount =12; // 12 gives a little over 100 FPS for(int i =0; i< loopCount; ++i) { // It takes 100 us (0.0001 s) to read an analog input xAccel += analogRead(X_ACCEL_APIN); yAccel += analogRead(Y_ACCEL_APIN); zAccel += analogRead(Z_ACCEL_APIN); //vRef += analogRead(V_REF_APIN); //xRate += analogRead(X_RATE_APIN); //yRate += analogRead(Y_RATE_APIN); } xAccel /= loopCount; yAccel /= loopCount; zAccel /= loopCount; //vRef /= loopCount; //xRate /= loopCount; //yRate /= loopCount; Serial.write( (unsigned byte*)&startTag, 2); Serial.write((unsigned byte*)&xAccel, 2); Serial.write((unsigned byte*)&yAccel, 2); Serial.write((unsigned byte*)&zAccel, 2); //Serial.write((unsigned byte*)&vRef, 2); //Serial.write((unsigned byte*)&xRate, 2); //Serial.write((unsigned byte*)&yRate, 2); #ifdef CHECK_FPS endTime = millis(); Serial.print(" - FPS: "); Serial.println(1.f/ (endTime-startTime) *1000); #endif }
3.4
프로세싱 코드
프로세싱 코드에서 한가지 주의 해야할 사항은 시리얼 포트를 각자의 환경에 맞추어서 수정을 해주어야 한다는 것이다.
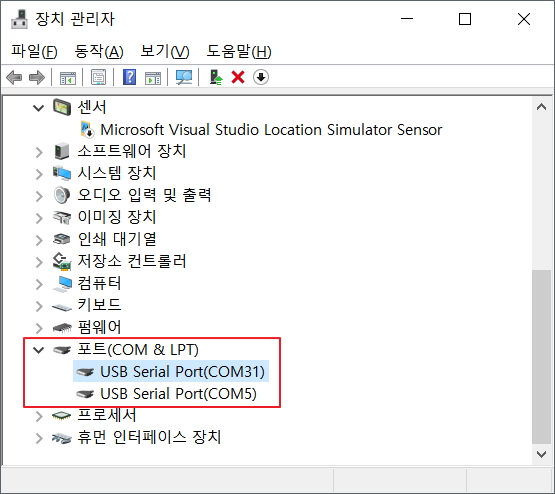
아래 프로세싱 코드에서 "[0]" 의 0이라는 숫자는 장치관리자에서 COM포트의 번호가 아니라 포트의 순서라는것에 주의 해야 한다.
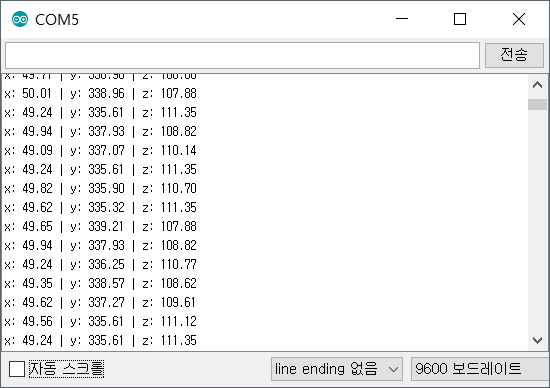
위의 장치관리자 화면에서 예를 든다면 다음과 같다.
Serial.list()[0]; // --> COM31
Serial.list()[1]; // --> COM5
프로세싱 코드를 실행할때 테스트하는 PC의 COM 포트 상태에 따라서 "Serial.list()[0]" 의 숫자를 바꾸어 주어야 한다.
(1) 프로세싱 코드
// Maurice Ribble // 6-28-2009 // http://www.glacialwanderer.com/hobbyrobotics // This takes data off the serial port and graphs it. // There is an option to log this data to a file. // I wrote an arduino app that sends data in the format expected by this app. // The arduino app sends accelerometer and gyroscope data. import processing.serial.*; // Globals int g_winW =820; // Window Width int g_winH =600; // Window Height // boolean g_dumpToFile = true; // Dumps data to c:\\output.txt in a comma seperated format (easy to import into Excel) boolean g_enableFilter =true; // Enables simple filter to help smooth out data. cDataArray g_xAccel =new cDataArray(200); cDataArray g_yAccel =new cDataArray(200); cDataArray g_zAccel =new cDataArray(200); //cDataArray g_vRef = new cDataArray(200); //cDataArray g_xRate = new cDataArray(200); //cDataArray g_yRate = new cDataArray(200); cGraph g_graph =new cGraph(10, 190, 800, 400); Serial g_serial; PFont g_font; voidsetup() { size(820, 600, P2D); println(Serial.list()); g_serial =new Serial(this, Serial.list()[0], 115200, 'N', 8, 1.0); g_font = createFont("Arial",14,true); fill(0, 0, 0); } voiddraw() { // We need to read in all the avilable data so graphing doesn't lag behind while (g_serial.available() >=2*6+2) { processSerialData(); } strokeWeight(1); fill(255, 255, 255); g_graph.drawGraphBox(); strokeWeight(1.5); stroke(255, 0, 0); g_graph.drawLine(g_xAccel, 0, 1024); stroke(0, 255, 0); g_graph.drawLine(g_yAccel, 0, 1024); stroke(0, 0, 255); g_graph.drawLine(g_zAccel, 0, 1024); // add axis info // This draws the graph key info strokeWeight(1.5); stroke(255, 0, 0); line(20, 460, 40, 460); stroke(0, 255, 0); line(20, 480, 40, 480); stroke(0, 0, 255); line(20, 500, 40, 500); textFont(g_font,16); // STEP 3 Specify font to be used fill(0); // STEP 4 Specify font color text("xAccel", 60, 460); text("yAccel", 60, 480); text("zAccel", 60, 500); /* if (g_dumpToFile) { // This clears deletes the old file each time the app restarts byte[] tmpChars = {'\r', '\n'}; saveBytes("c:\\output.txt", tmpChars); } */ } // This reads in one set of the data from the serial port voidprocessSerialData() { int inByte =0; int curMatchPos =0; int[] intBuf =newint[2]; intBuf[0] =0xAD; intBuf[1] =0xDE; while (g_serial.available() <2); // Loop until we have enough bytes inByte = g_serial.read(); // This while look looks for two bytes sent by the client 0xDEAD // This allows us to resync the server and client if they ever // loose sync. In my testing I haven't seen them loose sync so // this could be removed if you need to, but it is a good way to // prevent catastrophic failure. while(curMatchPos <2) { if (inByte == intBuf[curMatchPos]) { ++curMatchPos; if (curMatchPos ==2) break; while (g_serial.available() <2); // Loop until we have enough bytes inByte = g_serial.read(); } else { if (curMatchPos ==0) { while (g_serial.available() <2); // Loop until we have enough bytes inByte = g_serial.read(); } else { curMatchPos =0; } } } while (g_serial.available() <2*3); // Loop until we have a full set of data // This reads in one set of data { byte[] inBuf =new byte[2]; int xAccel, yAccel, zAccel, vRef, xRate, yRate; g_serial.readBytes(inBuf); // Had to do some type conversion since Java doesn't support unsigned bytes xAccel = ((int)(inBuf[1]&0xFF) <<8) + ((int)(inBuf[0]&0xFF) <<0); g_serial.readBytes(inBuf); yAccel = ((int)(inBuf[1]&0xFF) <<8) + ((int)(inBuf[0]&0xFF) <<0); g_serial.readBytes(inBuf); zAccel = ((int)(inBuf[1]&0xFF) <<8) + ((int)(inBuf[0]&0xFF) <<0); g_serial.readBytes(inBuf); g_xAccel.addVal(xAccel); g_yAccel.addVal(yAccel); g_zAccel.addVal(zAccel); /* if (g_dumpToFile) // Dump data to a file if needed { String tempStr; tempStr = xAccel + "," + yAccel + "," + zAccel + "," + vRef + "," + xRate + "," + yRate + "\r\n"; FileWriter file; try { file = new FileWriter("c:\\output.txt", true); //bool tells to append file.write(tempStr, 0, tempStr.length()); //(string, start char, end char) file.close(); } catch(Exception e) { println("Error: Can't open file!"); } } *//* print(xAccel); print(" "); print(yAccel); print(" "); print(zAccel); print(" "); print(vRef); print(" "); print(xRate); print(" "); println(yRate); */ } } // This class helps mangage the arrays of data I need to keep around for graphing. classcDataArray { float[] m_data; int m_maxSize; int m_startIndex =0; int m_endIndex =0; int m_curSize; cDataArray(int maxSize) { m_maxSize = maxSize; m_data =newfloat[maxSize]; } void addVal(float val) { if (g_enableFilter && (m_curSize !=0)) { int indx; if (m_endIndex ==0) indx = m_maxSize-1; else indx = m_endIndex -1; m_data[m_endIndex] = getVal(indx)*.5+ val*.5; } else { m_data[m_endIndex] = val; } m_endIndex = (m_endIndex+1)%m_maxSize; if (m_curSize == m_maxSize) { m_startIndex = (m_startIndex+1)%m_maxSize; } else { m_curSize++; } } float getVal(int index) { return m_data[(m_startIndex+index)%m_maxSize]; } int getCurSize() { return m_curSize; } int getMaxSize() { return m_maxSize; } } // This class takes the data and helps graph it classcGraph { float m_gWidth, m_gHeight; float m_gLeft, m_gBottom, m_gRight, m_gTop; cGraph(float x, float y, float w, float h) { m_gWidth = w; m_gHeight = h; m_gLeft = x; m_gBottom = g_winH - y; m_gRight = x + w; m_gTop = g_winH - y - h; } void drawGraphBox() { stroke(0, 0, 0); rectMode(CORNERS); rect(m_gLeft, m_gBottom, m_gRight, m_gTop); } void drawLine(cDataArray data, float minRange, float maxRange) { float graphMultX = m_gWidth/data.getMaxSize(); float graphMultY = m_gHeight/(maxRange-minRange); for(int i=0; i<data.getCurSize()-1; ++i) { float x0 = i*graphMultX+m_gLeft; float y0 = m_gBottom-((data.getVal(i)-minRange)*graphMultY); float x1 = (i+1)*graphMultX+m_gLeft; float y1 = m_gBottom-((data.getVal(i+1)-minRange)*graphMultY); line(x0, y0, x1, y1); } } }