�� �Ŵ����� JK����(JK Electronics) �� ���ؼ� ����, ����, �ۼ� �Ǿ��� ������ ����
JK����(JK Electronics)�� ���Դϴ�. ���������� �㰡�� ���� �ʰ� �������� ����, �����ϰų� ���� �� �� �����ϴ�.
STM32F10x Dragon ���ߺ��� ����
* Update history
- 2012.9.17 : �ʱ� Release
2012.9.17 S/W ������Ʈ
2012.11.5 RIDE7 ������Ʈ�� �߰� �Ǿ����ϴ�.
- 2013.11.5 : Eclipse ȯ���� GCC ����ȯ�� ���� �߰�
��Ŭ���� ����ȯ��- code.google.com �� ���� �ֽ� �ҽ��ڵ� �ٿ�ε�
1. STM32F10x Drgaon ���ߺ��� �Ұ�
2. STM32F10x Dragon ���ߺ��� ���
2.1 CPU������ H/W ���� �� ȸ�ε�
2.2 Bottom ������ H/W ���� �� ȸ�ε�
2.3 ���� S/W ���
3. �⺻ ����� �� �ٿ�ε� ���̵�
3.1 Dragon ���ߺ��� �⺻��� ���
3.2 ���α� �ٿ�ε� ���̵�
3.3 Cortex-M3 Architecture ����
3.4 STM32F10x �ø��� ���� ����
4. S/W ��Ʈ ���
4.1 LED
4.2 Timer
4.3 RTC
4.4 SD Memory(FAT32)
4.5 USB( HID Mouse )
4.6 LCD Display
4.7 EEPROM ��Ʈ
4.8 KEY �Է� ��Ʈ
4.9 nRF24L01(RF Test)
4.10 MP3 Play ��Ʈ
4.11 UART2 ��Ʈ
4.12 RS485 ��Ʈ
4.13 CAN ��Ʈ
4.14 ADC ��Ʈ
4.15 DAC ��Ʈ
4.16 LCD1602 ��Ʈ
4.17 LCD12864 ��Ʈ
5. ���α��� ���̵�
5.1 Keil MDK 4.2x
5.2 IAR Workbench 6.x
5.3 RIDE7
5.4 GCC & Eclipse
1. STM32F10x Dragon ���ߺ��� �Ұ�
STM32 Cortex-M3 �� ����� 32bit ARM ���ߺ���� STM32F10x MCU�� ����Ͽ� �ִ� 72 MHz�ӵ��� ���� �ϰ� CPU���� Bottom���尡 �и��Ǿ� �ֽ��ϴ�. Dragon Bottom ���忡��
nRF24L01 2.4Hz RF ���, MP3���, ��������, �µ����� ��� 2.8, 3.2, 4.3, 7.0 ��ġ�� TFT ��ġ LCD,
1602, 12864 LCD ���� �پ��� �ֺ���ġ�� �����ؼ� ����� �� �ֽ��ϴ�.
(1) STM32F10x Dragon ���ߺ��� ��ǰ�� ����
�� ��纰 �з� |
��ǰ�̸� |
��ǰ �⺻ ��� |
| LQFP100 | STM32F103VCT6 ���ߺ��� | Internal 256KB Flash, 48KB SRAM |
| LQFP144 | STM32F103ZET6 ���ߺ��� | Internal 512KB Flash, 64KB SRAM |
STM32 Dragon ���ߺ���� CPU���� STM32F10x Rabbit CPU ����� ����Ͽ����ϴ�.
������ LCD�������̽��� ���� FSMC �������̽��� ����Ͽ� Rabbit CPU ����� High Density CPU ��⸸ �����ϰ� �ֽ��ϴ�.
2. STM32F10x Dragon ���ߺ��� ���
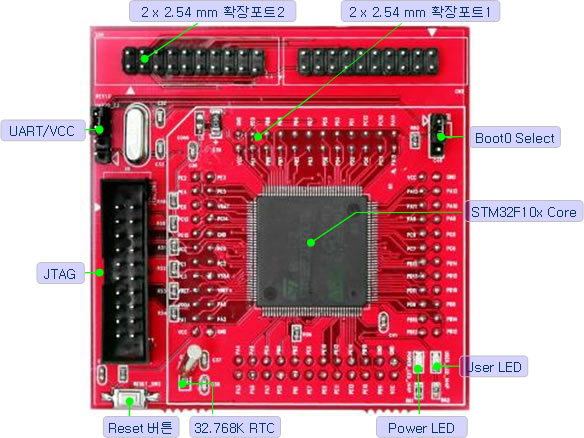
2.1 CPU������ H/W ���� �� ȸ�ε�
(1) LQFP100 �ø��� H/W ����( STM32F10x Rabbit CPU ����� ����Ͽ����ϴ�.)
* LQFP100 �ø��� �ɸ�
| JTAG | GND | PE0 | PB8 | PB6 | PB4 | PD7 | PD5 | PD3 | PD1 | PC12 | PC10 | PC14 | ||||||
| VCC | PE1 | PB9 | PB7 | PB5 | PB3 | PD6 | PD4 | PD2 | PD0 | PC11 | PA15 | |||||||
| PE2 | PE3 | VCC | GND | |||||||||||||||
| VCC | VCC | PE4 | PE5 | PA13 | PA12 | |||||||||||||
| JTRST | GND | PE6 | VBAT | PA11 | PA10 | |||||||||||||
| JTDI | GND | PC13 | PC14 | PA9 | PA8 | |||||||||||||
| JTMS | GND | PC15 | GND | PC9 | PC8 | |||||||||||||
| JTCK | GND | VCC | PC0 | PC7 | PC6 | |||||||||||||
| NC | GND | PC1 | PC2 | PD15 | PD14 | |||||||||||||
| JTDO | GND | PC3 | VSSA | PD13 | PD12 | |||||||||||||
| RESET | GND | VREF- | VREF+ | PD11 | PD10 | |||||||||||||
| NC | GND | VDDA | PA0 | PD9 | PD8 | |||||||||||||
| NC | GND | PA1 | PA2 | PB15 | PB14 | |||||||||||||
| VCC | GND | PB13 | PB12 | |||||||||||||||
| PA4 | PA6 | PC4 | PB0 | PB2 | PE8 | PE10 | PE12 | PE14 | PB10 | GND | GND | |||||||
| PA3 | PA5 | PA7 | PC5 | PB1 | PE7 | PE9 | PE11 | PE13 | PE15 | PB11 | VCC | |||||||
(2) LQFP144 �ø��� H/W ����( STM32F10x Rabbit CPU ����� ����Ͽ����ϴ�.)
* LQFP144 �ø��� �ɸ�
| PF1 | PF3 | PF5 | PF7 | PF9 | PF11 | PF13 | PF15 | VCC | VCC | GND | GND | PG14 | PG12 | PG10 | PG8 | PG6 | PG4 | PG2 | PG0 | |
| PF0 | PF2 | PF4 | PF6 | PF8 | PF10 | PF12 | PF14 | GND | GND | VCC | VCC | PG15 | PG13 | PG11 | PG9 | PG7 | PG5 | PG3 | PG1 | |
| JTAG | GND | PE0 | PB8 | PB6 | PB4 | PD7 | PD5 | PD3 | PD1 | PC12 | PC10 | PC14 | ||||||||
| VCC | PE1 | PB9 | PB7 | PB5 | PB3 | PD6 | PD4 | PD2 | PD0 | PC11 | PA15 | |||||||||
| PE2 | PE3 | VCC | GND | |||||||||||||||||
| VCC | VCC | PE4 | PE5 | PA13 | PA12 | |||||||||||||||
| JTRST | GND | PE6 | VBAT | PA11 | PA10 | |||||||||||||||
| JTDI | GND | PC13 | PC14 | PA9 | PA8 | |||||||||||||||
| JTMS | GND | PC15 | GND | PC9 | PC8 | |||||||||||||||
| JTCK | GND | VCC | PC0 | PC7 | PC6 | |||||||||||||||
| NC | GND | PC1 | PC2 | PD15 | PD14 | |||||||||||||||
| JTDO | GND | PC3 | VSSA | PD13 | PD12 | |||||||||||||||
| RESET | GND | VREF- | VREF+ | PD11 | PD10 | |||||||||||||||
| NC | GND | VDDA | PA0 | PD9 | PD8 | |||||||||||||||
| NC | GND | PA1 | PA2 | PB15 | PB14 | |||||||||||||||
| VCC | GND | PB13 | PB12 | |||||||||||||||||
| PA4 | PA6 | PC4 | PB0 | PB2 | PE8 | PE10 | PE12 | PE14 | PB10 | GND | GND | |||||||||
| PA3 | PA5 | PA7 | PC5 | PB1 | PE7 | PE9 | PE11 | PE13 | PE15 | PB11 | VCC | |||||||||
2.2 Bottom ������ H/W ���� �� ȸ�ε�
(1) Bottom ���� H/W ����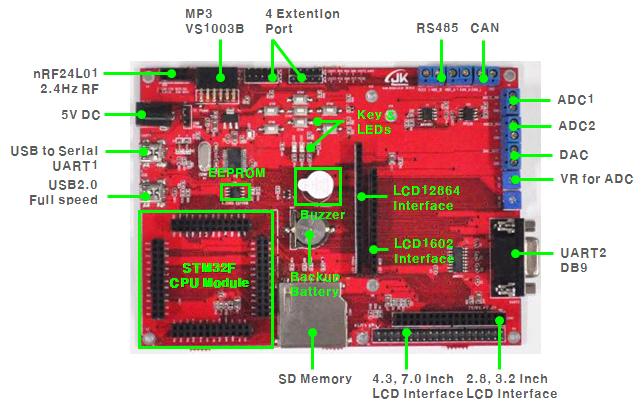
* STM32F10X Dragon ���ߺ��� ȸ�ε� �ٿ�ε�
2.3 ���� S/W ���
ST Micronics(http://www.st.com)�翡�� �����ϴ� �⺻ STM32F10x_StdPeriph_Driver, STM32_USB-FS-Device_Driver
�� ����ؼ� �ۼ��Ǿ������ϴ�.
LED, Timer, RTC, USB, RF(nRF24L01), MP3(VS1003B), 2.8, 3.2, 4.3, 7.0 ��ġ LCD, AT24C02 EEPROM, RS485, RS232,
CAN ���, ADC, DAC, 1602 Char LCD, 12864 ���� LCD, Buzzer, �µ�����, ��������
�� ���� ������ ���� �մϴ�.
IAR Workbench, Keil MDK, Ride7 ���� �������� �ҽ��� ������Ʈ ������ �ֽ��ϴ�.
(1) ����Ʈ���� ���丮
| prj | EWARMv6 MDK-ARM RIDE |
IAR Embeded Workbench Version 6.x RealView(Keil) MDK-ARM Version 4.2x Raisonance's Ride7 Version 7.24.06.0251 |
| lib | STM32_USB-FS-Device_Lib_V3.4.0 | ST's ǥ�� ���̺귯�� |
| src | ���� ���� �ڵ� |
(2) STM32 ǥ�� ���̺귯�� ���� : STM32_USB-FS-Device_Driver_V3.4.0, STM32F10x_StdPeriph_Driver_V3.4.0
(3) ����Ʈ���� �ҽ� �ٿ�ε�
- 2012.9.17 ���� ���� �ҽ� �ٿ�ε�
- code.google.com �� ���� �ֽ� �ҽ��ڵ� �ٿ�ε�
3. �⺻ ����� �� �ٿ�ε� ���̵�
3.1 Dragon ���ߺ��� �⺻��� ���
(1) CPU��� �����CPU���� UART��Ű� ���� ������ �ϱ� ���ؼ��� 4Pin Ŀ���Ͱ� ���� �ֽ��ϴ�.
- USB2Uart �ٿ�δ� for Rabbit �� �̿��ؼ� PC�� �ø��� ��� ����

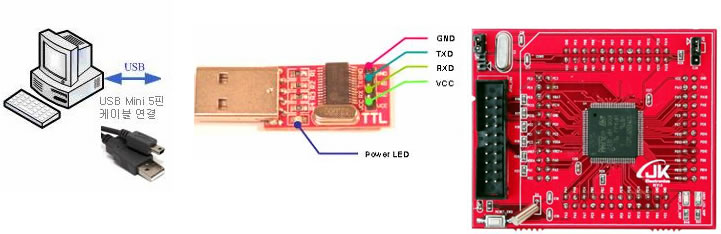
- �Ϲ����� USB2Serial ��ȯ ���̺��� �̿��ؼ� PC�� �ø��� ��� ����
�Ϲ����� USB2Serial ��ȯ ���̺��� �̿��� ��쿡�� �Ʒ� ���� ���� 4���� ���� CPU�� Ŀ���ͷ� �����ؼ�
����ϸ� �˴ϴ�.
(2) Bottom���� �����
Bottom ���忡�� USB to Serial ��Ʈ�� �̹� ����Ǿ� �־ PC���� Mini USB���̺��� �̿��ؼ� �����Ͻø� �˴ϴ�.
USB��Ʈ�� ���ؼ� �������� ���� �� �� �ֽ��ϴ�.
(3) PC�� USB to Serial ����̹� �ٿ�ε� �� ��ġ( ��â )
(4) ������ �̳� ����
PC�� ������ ���������� ������ �̳��� ���ؼ� �Ʒ��� ���� ������ Ȯ�� �� �� �ֽ��ϴ�.
���� CPU����� USER LED(���)�� ������ ���� �� �� �ֽ��ϴ�.
3.2 ���α� �ٿ�ε� ���̵�
* ���α� �ٿ�ε� ���̵�� STM32F10x Rabbit ���ߺ��带 �������� ���� �Ͽ����ϴ�.Dragon ���ߺ��忡�� STM32F10x Rabbit CPU ����� ����ϰ� �ֱ� ������ �ٿ�ε��ϴ� ����� ���� �մϴ�.
(1) �ø��� ����� �̿��� ���(��â)
STM32F �ø���� JTAG �ٿ�δ��� ���� USART0 ��Ʈ�� �̿��ؼ� ���α��� �ٿ�ε� �� �� �ִ� ISP����� ���� �մϴ�.
���� ����� ���Ե�� ������ ������ �ٿ�ε常 �����ϰ� �ڵ� ������� �� �� �����ϴ�.
Keil MDK, IAR Workbench ���� H-JTAG�� �̿��� �ٿ�ε� ����� ����� ���
(3) ARM-JTAG �� �̿��� ���(IAR Workbench), KEIL MDK
Keil MDK, IAR Workbench ���� ARM-JTAG�� �̿��� �ٿ�ε� ����� ����� ���
(4) ST-Link �� �̿��� ���(��â)
Keil MDK, IAR Workbench ���� ST-Link�� �̿��� �ٿ�ε� ����� ����� ���
(5) RLink �� �̿��� ��� (��â)
RIDE7 ���� RLink�� �̿��� �ٿ�ε� ���
(6) J-Link EDU �� �̿��� ���
IAR Workbench ���� J-Link EDU �� �̿��� �ٿ�ε� ���(��â)
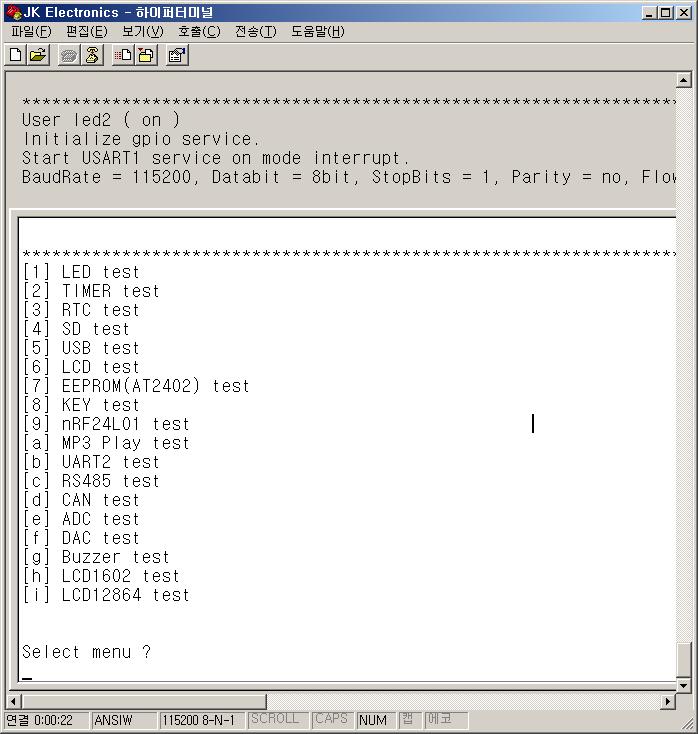
4. S/W ��Ʈ ���
4.1 LED
[1] User LED on : CPU����� ����� USER LED�� Bottom ������ ����� USER LED 3���� ��� �����ϴ�.
[2] User LED off : CPU����� ����� USER LED�� Bottom ������ ����� USER LED 3���� ��� �����ϴ�.
4.2 Timer
[1] TIM2 ticktime test : CPU����� ����� USER LED�� 1�ʰ������� ���� �Դϴ�.
[2] TIM2 blink stop : 1�� Ÿ�̸Ӱ� ���� �˴ϴ�.
4.3 RTC
[1] RTC service start : RTC ���ͷ�Ʈ�� �Ƽ� 1�ʿ� �ѹ��� �ð��� ǥ���� �ְ� �ֽ��ϴ�.
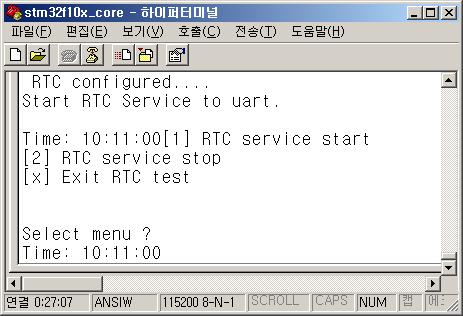
[2] RTC service stop : RTC ���� ���� �˴ϴ�.
�ھ������ RTC ��� ������ ��� ������ �ð� ������ ��������� �ʽ��ϴ�.
4.4 SD Memory(FAT32)
FAT32 ���� �ý����� �����Ͽ� SD�� ���� �� �� �ֽ��ϴ�. MP3 Player ���� ������ �ݵ�� �ʿ��� ��� �Դϴ�.
��� ������ SD Memory ī�带 ���������� �ʽ��ϴ�.
SD �� ī���� ������ ���� ������ ���� ���� ���� ������,
�̺κ��� ��Ʈ�� �Ϸ�� SD�� ī�带 ����ؼ� ������Ʈ�� �帮���� �ϰڽ��ϴ�.
SD�� ī��� PC���� FAT32 �������� ������ �Ǿ� �־�� �մϴ�.
��Ʈ�� �Ϸ�� SD�� ī��� ������ �����ϴ�.
- ���ù� 2GB, 8GB Memory
- SanDisk 2GB, 8GB ��
SD �� ��Ʈ�� ���ؼ� SD �� ���ߺ����� ���Ͽ� ���� �մϴ�.
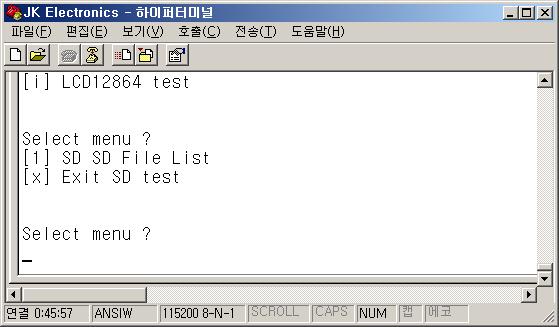
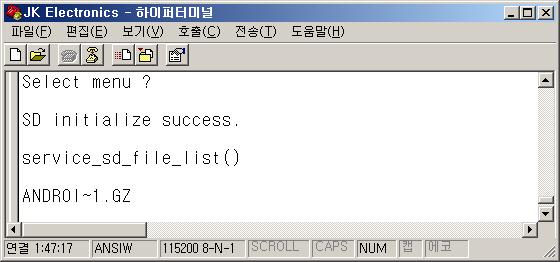
[1] SD File List : SD���� ������ ����Ʈ�� ���� �ݴϴ�.
[x] Exit SD test : ��Ʈ�� �����ϰ� ���� ���� �̵� �մϴ�.
4.5 USB( HID Mouse )
USB ����̽� ��Ʈ�� ���ؼ��� Dragon Bottom �� �ʿ� �մϴ�. Bottom������ USB to Serial ��Ʈ�� ����Ǿ� �ִ����¿��� USB to Serial ��Ʈ ���� �ִ� USB Mini��Ʈ�� PC�� ���� �մϴ�.
* USB ��Ʈ�� ���ǻ���
CAN ���ͷ�Ʈ�� USB ���ͷ�Ʈ�� ���� ����� �Ұ��� �մϴ�.
USB ��Ʈ�� ���ؼ��� �����ϴ� �ҽ��� hw_config.c ������ void bsp_init_rcc(void) �Լ����� �Ʒ� �κ��� �ּ�ó�� �ؾ� �մϴ�.
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
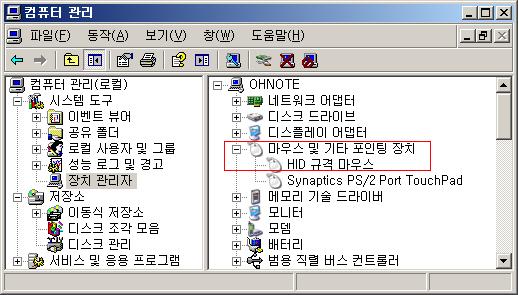
[1] USB service start : USB ���� ������ �Ǹ� �Ʒ� ���� ���� ��ġ�����ڿ� "HID �� ���콺" �� ������ �˴ϴ�.
�������̳ο��� "L", "R", "U", "D" ���� �Է��ϸ� PC�� ���콺 Ŀ���� �����̰� �˴ϴ�.
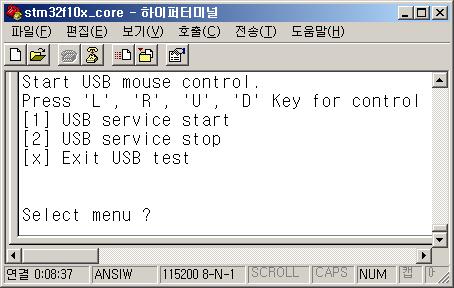
[2] USB service stop : USB ���� ���� �մϴ�.
4.6 LCD Display
(1) �������̳� ���� "6" �� �Է��ϸ� LCD ������ ���ɴϴ�.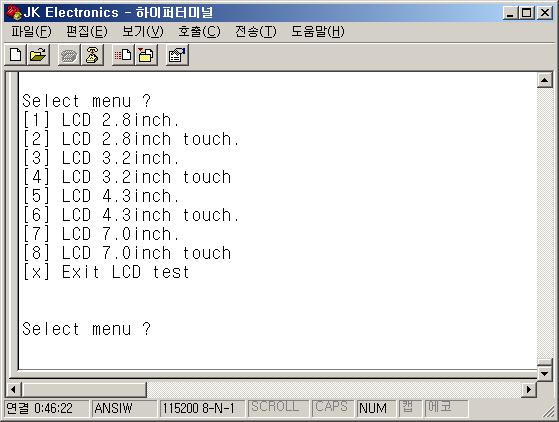
Dragon ���ߺ���� 2.8, 3.2, 4.3, 7.0 ��ġ ��ġ LCD�� FSMC ���� �������̽��� �����ϰ� �ֽ��ϴ�.
4.3��ġ(480*272), 7.0��ġ( 800*480) �ػ� ���� ȭ�� ���żӵ��� 3.2��ġ( 320*240 ) ���żӵ��� ��� �մϴ�.
��Ʈ ����� �����Ͻ� LCD�� �´� ���� ������ �̳ο��� ���ø� �ϸ� �˴ϴ�. ���� ȭ���� �Ʒ� ������ ���� �Ͻñ� �ٶ��ϴ�.
* 4.3��ġ ��ġ LCD ��Ʈ ����
* 7.0��ġ ��ġ LCD ��Ʈ ����
4.7 EEPROM �Է� ��Ʈ
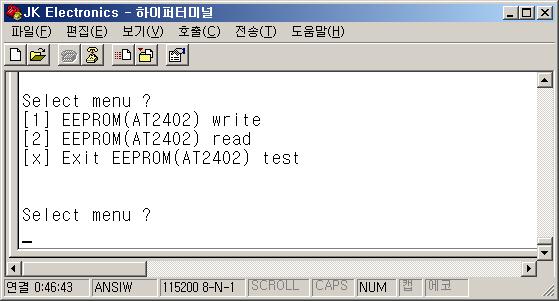
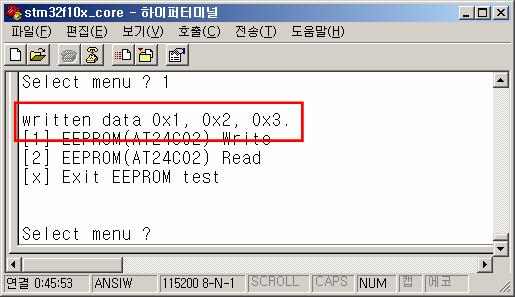
[1] EEPROM(AT24C02) Write : AT24C02 EEPROM�� Data�� Write �մϴ�.
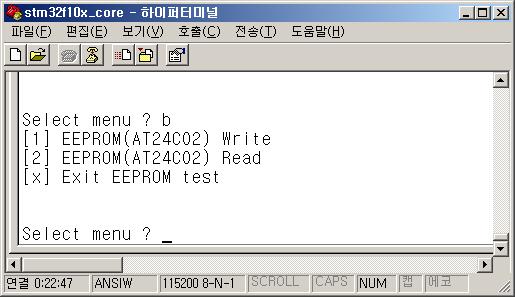
[2] EEPROM(AT24C02) Read : AT24C02 EEPROM���� Data�� Read �մϴ�.
[x] Exit EEPROM test
4.8 KEY �Է� ��Ʈ
Dragon ���ߺ��忡�� �� 7���� User KEY�� �ֽ��ϴ�. �� �߿��� BTN1 ~ BTN5������ KEY �Է� ��Ʈ�� �غ����� �ϰڽ��ϴ�.������ BTN1 ~ BTN4�� Polling ������� KEY�Է��� �˻� �Ͽ��� BTN5�� EXTI(�ܺ� ���ͷ�Ʈ) ������� �˻� �Ͽ����ϴ�.
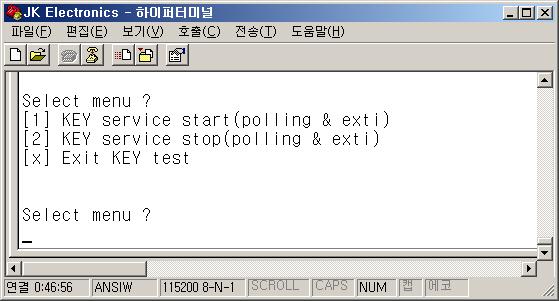
[1] KEY service start(polling & exti)
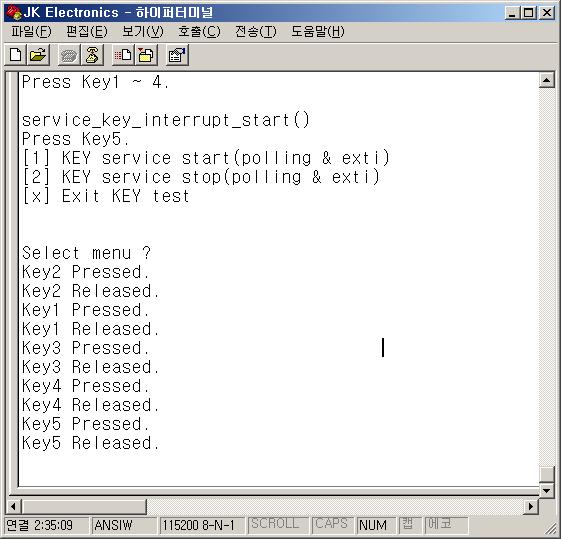
[2] KEY service stop(polling & exti) : KEY �Է� ���� ���� �մϴ�.
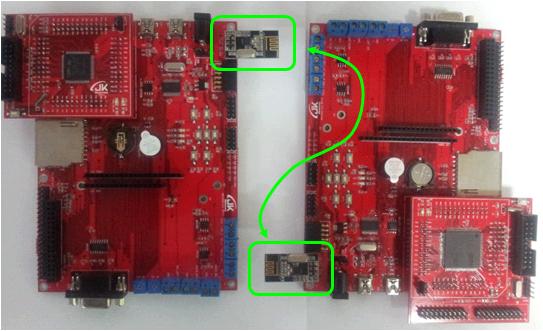
4.9 nRF24L01(RF Test)
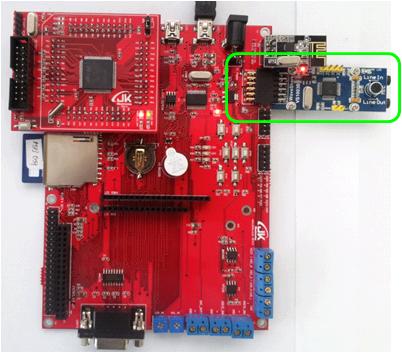
(1) nRF24L01 ��Ʈ�� ���ؼ��� 2���� Dragon ���ߺ���� 2���� nRF24L01 ������ ����� �ʿ� �մϴ�.
������ Dragon ���ߺ���� PC�� ���� �մϴ�.
nRF24L01 ��� �����ϱ�
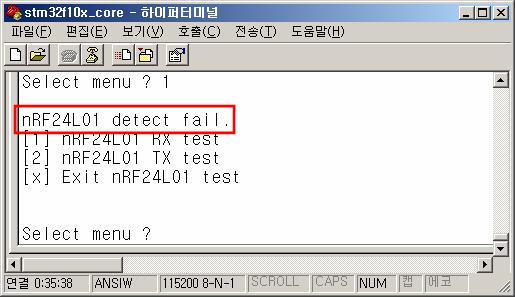
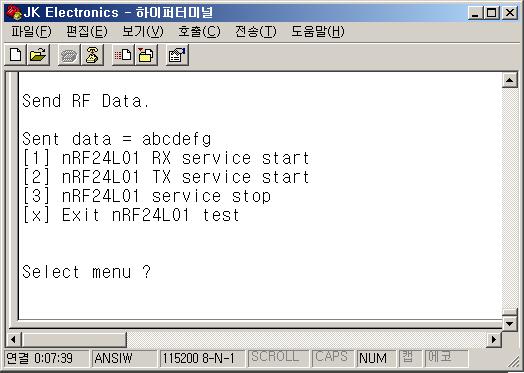
[1] nRF24L01 Rx Service Start : ù��° ���ߺ��忡�� ���� RX ���� ���� �մϴ�.
- RX��忡�� �����Ͱ� ���۵DZ⸦ ��ٸ�
- �Ʒ� ȭ���� nRF24L01���� ����� ���� ���� ��쿡 ���ϴ� ���� ȭ�� �Դϴ�.
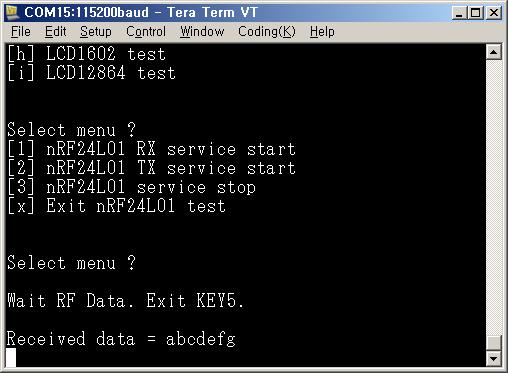
[2] nRF24L01 Tx Service Start : �ι�° ���ߺ��忡�� TX������ ���� �ϸ� RX��忡 �ִ� ���ߺ��忡 ���۵� ������ ���� �ݴϴ�.
������ ����ϰ� �ִ� RX�� �̳ο� RF �����Ͱ� ���ŵ� ȭ�� �Դϴ�.
4.10 MP3 Play ��Ʈ
MP3 Play������ ���� ��Ű�� ���ؼ��� SD�� MP3���ϵ��� PC���� ������ �ϰ� ���ߺ�����SD �� ���Ͽ� ���� �մϴ�. SD�� ī��� PC���� FAT32 �������� ������ �Ǿ� �־�� �մϴ�.
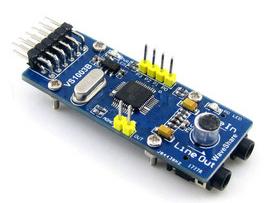
���� ������ VS1003B MP3 ����� �־�� �մϴ�
VS1003B MP3 ��� �����ϱ�
.
��� SD �� ī�带 ���� ������ ������ SD �� ī���� ������ ���� ������ ���� ���� ���� ������, �̺κ��� ��Ʈ�� �Ϸ�� SD�� ī�带 ����ؼ� ������Ʈ�� �帮���� �ϰڽ��ϴ�.
��Ʈ�� �Ϸ�� SD�� ī��� ������ �����ϴ�.
- ���ù� 2GB, 8GB Memory
- SanDisk 2GB, 8GB ��
���ߺ��忡 MP3 ���� MP3 ������ ����Ǿ� �ִ� SD �� ���� �մϴ�.
[1] MP3 Play Start : SD���� ��Ʈ�� ��� MP3 ���ϵ��� ���������� ��� �մϴ�.
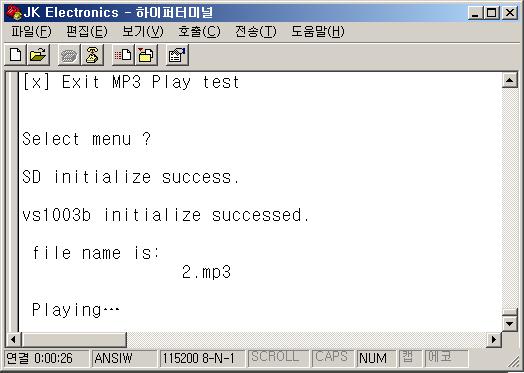
[2] Mp3 Play Stop : MP3 ����� �ߴ� �մϴ�.
4.11 UART2 ��Ʈ
���ߺ����� UART1, UART2 ���� ��� ��Ʈ�� �� �� �ֽ��ϴ�. ��Ʈ�� �����ϱ� ���� ���� ���ߺ����� UART2(DB9 Ŀ����)��
PC�� ���� ��Ű�� �������̳� Ȥ�� �ٸ� ��� ���α����� 115200bps �ӵ��� ������ �մϴ�. ��Ʈ ������ COM1(UART1) ����
������ ���� �մϴ�.
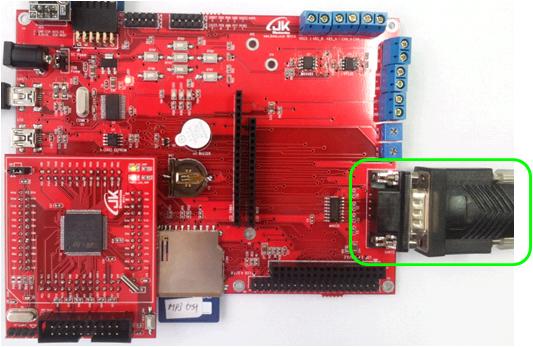
���ߺ����� UART1(USB to Serial ��Ʈ)�� DB9(UART2) �� ��� PC�� �����մϴ�.
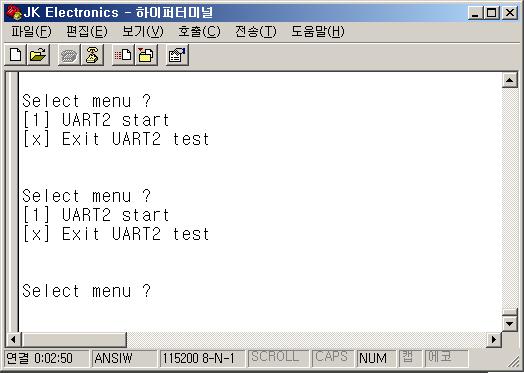
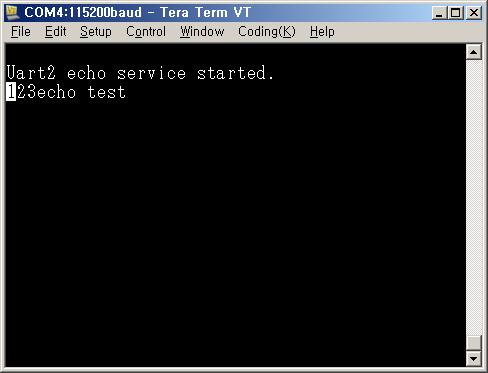
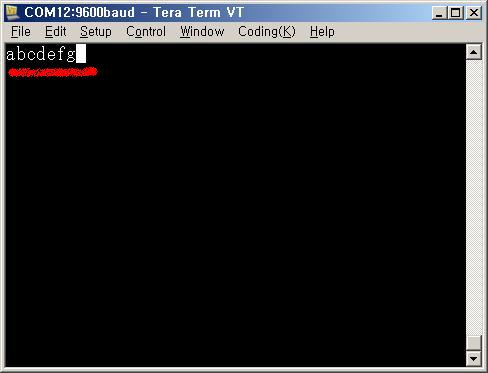
[1] UART2 test : UART2 ��Ʈ�� ����� ��� �̳ο� "uart2 echo serive is started." ������ Display �ǰ�
UART2�� ����� �̳ο��� Ư�� ���ڸ� �Է��ϸ� �ٷ� Echo �� �Ǿ� ȭ�鿡 ��Ÿ���� �˴ϴ�.
4.12 RS485 ��Ʈ
4.12.1 Dragon ���ߺ��� ���̿� ��� ��Ʈ
RS485��� ��Ʈ�� ���ؼ��� Dragon ���ߺ��尡 2��Ʈ�� �ʿ� �մϴ�.
(1) �Ʒ� ���� ���� Dragon ���ߺ��� 2�븦 RS485 �̳� ������ "A" <-> "A", "B" <-> "B" �� ���� �մϴ�.
2���� ���ߺ��忡 ������� 485_B, �������� 485_A ��� ��ũ �Ǿ� �ִ� ��Ʈ�� ���� �մϴ�.
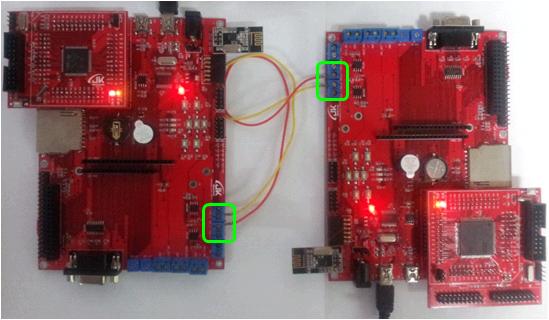
(2) ���� ���ߺ����� COM1 ��Ʈ�� �̴� USB���̺��� ���� �մϴ�.
(3) ��ġ �����ڿ��� ������ �ø��� ��Ʈ�� Ȯ���ϰ� �̳� ���α��� ���� �մϴ�.
(4) ���ߺ����� 1��Ʈ�� "RS485 Slave test" �� �����ؼ� Slave Mode���� ��� �մϴ�.
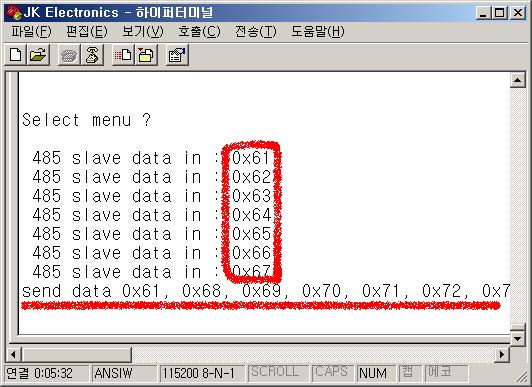
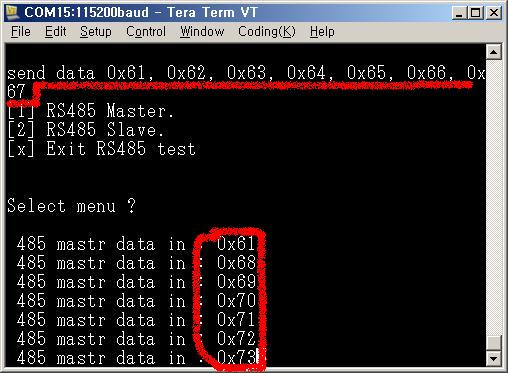
(5) ���ߺ����� 1��Ʈ�� "RS485 Master test" �� �����ؼ� Master Mode���� 485������ Slave Mode������ ���� �մϴ�.
"0x61 ~ 0x73" ���� ������ RS485 Slave�� ������ �ϸ� RS485 Slave ��忡�� ��� �ϰ� �ִ� ���ߺ��忡�� �ٽ� Master ������ ���� ������ �����մϴ�.
4.12.2 Dragon ���ߺ���� RS485 ��� ��� ���̿� ��Ʈ
(1) Dragon ���ߺ���� "USB to 485" ��ǰ�� ���� �մϴ�. ���� ����� Dragon ���ߺ��� ���� ����� ���� �մϴ�.
RS485 �̳� ������ "A" <-> "A", "B" <-> "B" �� ���� �մϴ�. ������� 485_B, �������� 485_A ��� ��ũ �Ǿ� �ִ� ��Ʈ�� ���� �մϴ�.
USB to RS485 ��� �����ϱ�
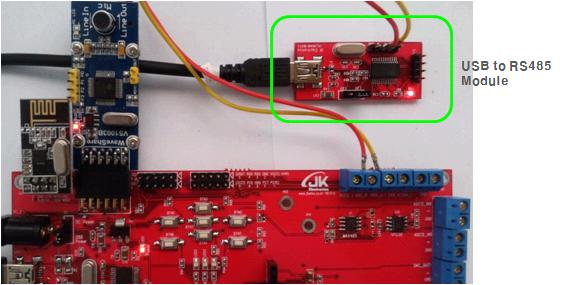
(2) "USB to 485" ��ǰ�� �̳� ����� Baudrate�� �ݵ�� 9600bps�� ���� �ؾ� �մϴ�.
(3) Dragon ���ߺ��忡�� "RS485 Master test" �� �����ؼ� Master Mode���� 485������ Slave Mode( "USB to 485") ������ ���� �մϴ�.
4.13 CAN ��Ʈ
* CAN ��Ʈ�� ���ǻ���
CAN ���ͷ�Ʈ�� USB ���ͷ�Ʈ�� ���� ����� �Ұ��� �մϴ�.
CAN��Ʈ�� ���ؼ��� �����ϴ� �ҽ��� hw_config.c ������ void bsp_init_rcc(void) �Լ�����
�Ʒ� �κ��� �ּ��� ���� �ؾ� �մϴ�.
�ݴ�� USB�� ����ϱ� ���ؼ��� �Ʒ� �κ��� �ּ�ó�� �ؾ� �մϴ�.
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);
[1] CAN Loopback : �Ʒ��� ���� ������ ������ �켱 ��ü ��Ʈ�� ���� �Դϴ�.
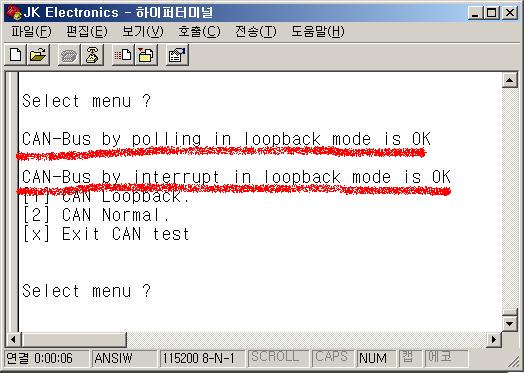
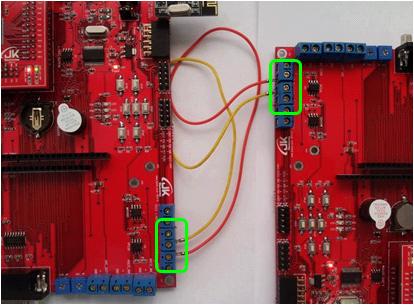
[2] CAN Normal : CAN ��� ��Ʈ�� �ϱ� ���ؼ��� Dragon ���ߺ��� 2��Ʈ�� �ʿ� �մϴ�.
2���� ���ߺ��忡 ������� CAN_H, �������� CAN_L ��� ��ũ �Ǿ� �ִ� ��Ʈ�� ���� �մϴ�.
(2) ���� ���ߺ����� COM1 ��Ʈ�� �̴� USB���̺��� ���� �մϴ�.
(3) ��ġ �����ڿ��� ������ �ø��� ��Ʈ�� Ȯ���ϰ� �̳� ���α��� ���� �մϴ�.
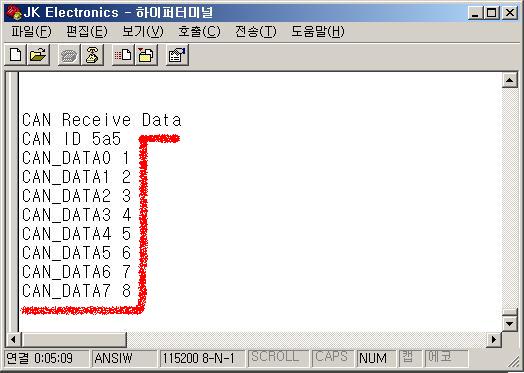
(4) ���ߺ����� 1��Ʈ�� "[2] CAN Normal " �� �����ؼ� CAN ������ �۽� �մϴ�.
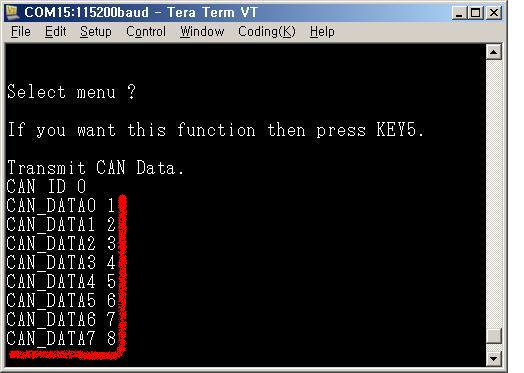
(5) �ݴ�� ����� ���ߺ��忡���� ���������� "[2] CAN Normal " �� �����ؼ� CAN ������ �۽Ű� ���ÿ� ������ �մϴ�.
4.14 ADC ��Ʈ
[1] ADC12 IN15 VR Input : ���ߺ��忡 �ִ� ���� ����(ADC_VR)�� ������ ADC �Է��� ��Ʈ �غ��� �ֽ��ϴ�.
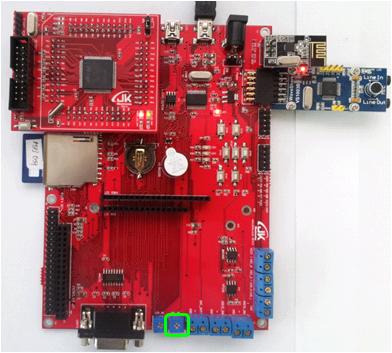
���� ������ �� �ڽ��� �ִ� ��������(ADC_VR) �� �¿�� �����ϸ� �̳ο� ��ȭ�� ���а��� ǥ�� �մϴ�.
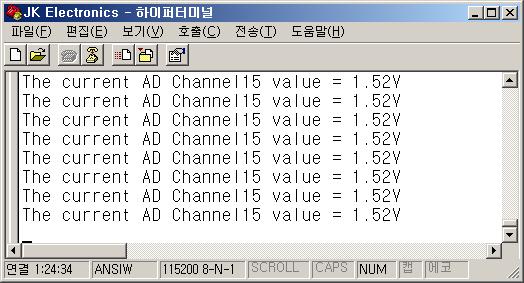
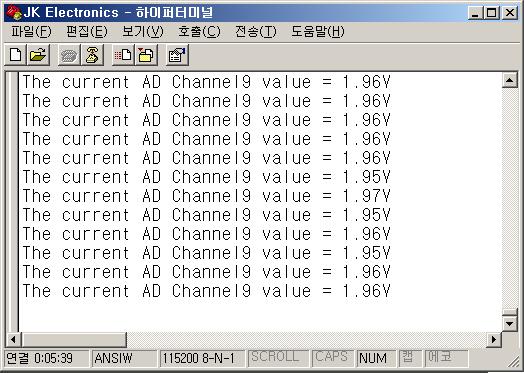
[2] ADC12 IN9 Input
[3] ADC12 IN8 Input : �ܺο� ����� ���е��� ���� ADC ��Ʈ�� ���ؼ� �о� ���� �ݴϴ�.
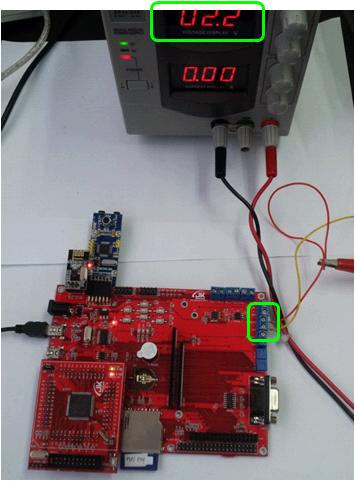
Power supply���� DC 2.2V�� �ΰ��Ͽ���, �Ʒ� ���ߺ��忡���� 1.6V�� ǥ���ϰ� �ֽ��ϴ�.
0.2 ~ 0.3 V������ ���̰� ���°��� �ڵ� �ۼ��� STM32�� AVCC�� �ΰ��Ǵ� ���� ������ �����ؼ� �ݿ��� �ϸ�
������ ���� �� �ֽ��ϴ�.
4.15 DAC ��Ʈ
[1] DAC1 Noise output : ���� ����� �Ϻ��ϰ� �������� �ʾҽ��ϴ�.
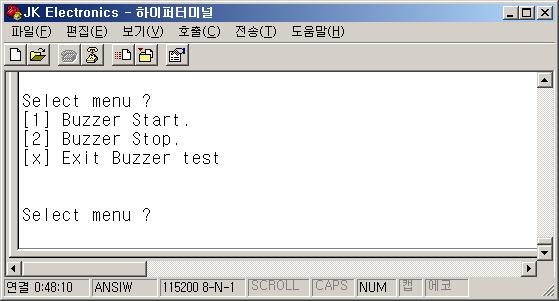
4.16 Buzzer ��Ʈ
[1] Buzzer Start : Buzzer���� Beep ���� �︳�ϴ�.
[2] Buzzer Stop : Beep ������ �ߴ� �մϴ�.
4.16 LCD1602 ��Ʈ
[1] LCD1602 test : LCD1602 ����� �ʱ�ȭ �ϰ� LCDȭ�鿡 Text�� Display �մϴ�.
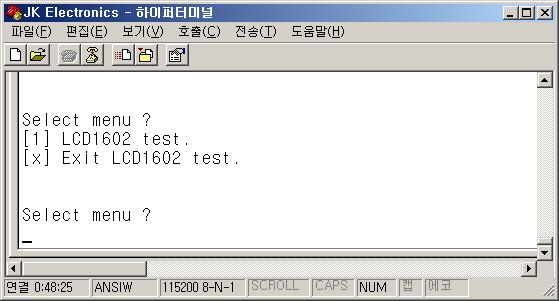
1602LCD�� ��Ⱑ ��Ӱų� �ʹ� ���� ��쿡�� LCD_VR�� ������������ ���� �� �� �ֽ��ϴ�. �Ʒ� ������ �� �ڽ� �κ��Դϴ�.

4.17 LCD12864 ��Ʈ
[1] LCD12864 test : LCD12864 ����� �ʱ�ȭ �ϰ� LCDȭ�鿡 Text�� Display �մϴ�.

12864LCD�� �ؽ�Ʈ ��Ⱑ �ʹ� ��ο� ��쿡�� �Ʒ� ���� ��� ���� VR�� ����̹����� �̿��ؼ� ���� �մϴ�.

5. ���α��� ���̵�
5.1 Keil MDK 4.2x
���α� ������ ���� Keil MDK �����Ϸ� ���� ����� ������(��â)5.2 IAR Workbench 6.x
���α� ������ ���� IAR �����Ϸ� ���� ����� ������(��â)5.3 RIDE7
���α� ������ ���� RIDE7 �����Ϸ� ���� ����� ������(��â)5.4 GCC & ��Ŭ����
���α� ������ ���� ��Ŭ���� & GCC ���� ����� ������(��â)