이 매뉴얼은 JK전자(JK Electronics) 에 의해서 번역, 수정, 작성 되었고 소유권 또한
JK전자(JK Electronics)의 것입니다. 소유권자의 허가를 받지 않고 무단으로 수정, 삭제하거나 배포 할 수 없습니다.
EEPROM AT24C02 모듈 Atmega128 제어 예제
* Update history
- 2012.9.20 : 초기 Release
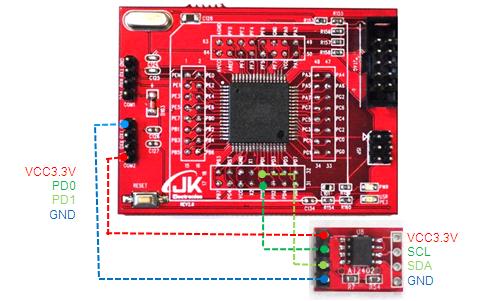
(1) Atmega128 Rabbit 개발보드와 아래와 같이 연결(I2C 인터페이스로 제어) 합니다.
주의할 점은 AT24C02는 반드시 전원 공급을 3.3V로 해야 합니다. 5V연결 할 경우 발열과 함께 IC에 데미지를 입을 수 있습니다.
(2) 제어 소스(ATMEGA128 Avrstudio 4.14 Build589 프로젝트 소스 다운로드 )
I2C 인터페이스를 통해서 EEPROM에 Write 하고 Read 하는 예제 입니다. 결과는 ATMEGA128의 UART1 포트를 통해서 확인 할 수 있습니다.
|