ARM Architecture
* Update history
- 2012.8.14 : �ʱ� Release
5. ARM Processor
5.1 ARM ������� ����
5.2 ARM Processor ����
6. ARM Architecture
6.1 ARM based system
6.2 ARM Operating Modes
6.3 ARM Registers
6.4 ARM Exceptions
6.5 Exception �� Interrupt�� ����
6.6 ARM������ Interrupt system
5. ARM Processor
4������� �б��ٴҶ� �ѹ����� ��� �R������ �������� �ټ� ������ �����̾��� �����ϴ�. ���� 5����� ���������� ARM �� ���ؼ� ������ ������ �ϰڽ��ϴ�.
ARM(����ȸ��) ��� architecture core �� system core �� License ���ִ� IP ȸ�� �Դϴ�.
���� �ݵ�ü�� �����Ͽ� �Ǹ��ϴ� ���� �ƴ϶� ������ ���μ����� �ݵ�ü ȸ�翡 Hard Macrocell(�����Ұ�) �Ǵ� Synthesizable core(�Ϻ� ���� ����) �� ���� �մϴ�.
�ݵ�ü ����ȸ�翡���� ARM��� ���� �������� ARM core�� �ֺ� ��ġ�� �߰��Ͽ� SOC�� ����� ����ڿ��� �Ǹ��ϰų� ��ü ��ǰ�� ��� �մϴ�.
������ �Ʒ� ������� �ֱ� ARM���� ���� �Դϴ�. Cortex-M3(2004��), M0(2009��), M4(2010��), ���� ��ǥ�� � ���� �˼��� �ֳ�.
2012
- ARM, Gemalto and G&D form joint venture to deliver next-generation mobile security
- First Windows RT (Windows on ARM) devices revealed
- ARM, AMD, Imagination, MediaTek and Texas Instruments founding members of Heterogeneous System Architecture (HSA) Foundation
- ARM and TSMC work together on FinFET process technology for next-generation 64-bit ARM processors
- ARM forms first UK forum to create technology blueprint “Internet of Things” devices
- ARM named one of Britain’s Top Employers
- MIT Technology Review named ARM in its list of 50 Most Innovative Companies
2011
- ARM ranked #12 in FastCompany’s 50 Most Innovative Companies
- WIRED magazine named Warren East in the UK’s Most Influential Leaders
- ARM CEO Warren East makes Barron’s list of the World’s Top 30 CEOs
- ARM was again included in the FTSE4Good Index, designed to measure the performance of companies that meet globally-recognized corporate responsibility standards
- ARM granted Queen’s Award for Enterprise (Innovation Category)
- Microsoft unveils Windows on ARM at CES 2011
- IBM and ARM collaborate to provide comprehensive design platforms down to 14nm
- ARM and UMC extend partnership into 28nm
- Cortex-A7 processor launched
- Big.LITTLE processing announced, linking Cortex-A15 and Cortex-A7 processors
- ARMv8 architecture unveiled at TechCon
- AMP announce license and plans for first ARMv8-based processor
- ARM Mali-T658 GPU launched
- ARM expands R&D presence in Taiwan with Hsinchu Design Center
- ARM and Avnet launch Embedded Software Store (ESS)
- ARM, Cadence and TSMC tape out first 20nm Cortex-A15 multicore processor
2010
- Giesecke & Devrient secure mobile payments announcement via ARM TrustZone and G&D's Mobicore technologies
- ARM launches Cortex-M4 processor for high performance digital signal control
- ARM together with key Partners form Linaro to speed rollout of Linux based devices
- Microsoft becomes ARM Architecture Licensee
- ARM & TSMC sign long-term agreement to achieve optimized Systems-on-Chip based on ARM processors, extending down to 20nm
- ARM extends performance range of processor offering with the Cortex-A15 MPCore processor
- ARM Mali becomes the most widely licensed embedded GPU architecture
- ARM Mali-T604 Graphics Processing Unit introduced providing industry-leading graphics performance with an energy-efficient profile
- ARM announces Corelink 400 series of AMBA 4 protocol-compliant system IP
2009
- ARM announces 2GHz capable Cortex-A9 dual core processor implementation
- ARM invests in Japanese software vendor eSOL to develop enhanced platforms for next-generation automotive electronics
- ARM launches its smallest, lowest power, most energy efficient processor, Cortex-M0
- ARM Ltd. receives Best Companies accreditation
- ARM extends its leadership in media processing by acquiring Logipard AB
2008
- ARM announces 10 billionth processor shipment
- ARM wins Britain's Top Employer Award 2008 from crf.com
- ARM announces Industry First silicon-on-Insulator Physical IP for IBM's 45nm SOI Foundry
- ARM Mali-200 GPU Worlds First to achieve Khronos Open GL ES 2.0 conformance at 1080p HDTV resolution
2007
- Five billionth ARM Powered processor shipped to the mobile device market
- ARM Cortex-M1 processor launched – the first ARM processor designed specifically for implementation on FPGAs
- AMBA Adaptive Verification IP launched
- RealView Profiler for Embedded Software Analysis introduced
- ARM unveils Cortex-A9 processors for scalable performance and low-power designs
- ARM Introduces SecurCore SC300 Processor For Smart Card Applications
- Warren East, CEO, wins Orange Business Leader of the Year Award
2006
- IEEE honors ARM with its 2006 Corporate Innovation Recognition award.
- ARM Cortex-A8 processor recognized as "Best In 2005" by four leading electronics industry publications
2005
- ARM listed by Electronic Business as one of the ten most significant companies in electronics over the past 30 years
- ARM acquired Keil Software
- ARM Cortex-A8 processor announced
- ARM launched DesignStart Program
2004
- ARM acquired Artisan Components Inc.
- The ARM Cortex family of processors, based on the ARMv7 architecture, is announced. The ARM Cortex-M3 is announced in conjunction, as the first of the new family of processors
- ARM Cortex-M3 processor announced, the first of a new Cortex family of processor cores
- NEON media acceleration technology announced
- ARM technology licensed to Aplix, Atheros, Broadcom, CSR, Kawasaki, NEC, Socle, Sony Ericsson, Thomson, Toshiba, Samsung and ZRRT
- ARM acquired Axys Design Automation
- MPCore multiprocessor launched, the first integrated multiprocessor
- OptimoDE technology launched, the groundbreaking embedded signal processing core
5.1 ARM ������� ����
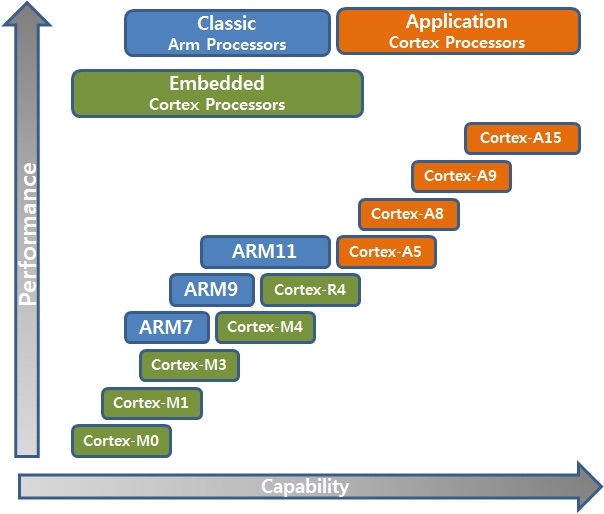
ARM Processor�� ���ؼ� ������� ������ �غ� ���Դϴ�. �� ǥ�� �ٸ��� �з��� �ϴ� ����鵵 �ֽ��ϴ�. �̰��� �� �������� �Ǵܿ� ���� �з� �Դϴ�.
Cortex ���μ��� ������ ARM Processors���� �������� ARM���� �з� �Ͽ��� Cortex-M, R �ø��� ������ ������ uCOM������ ���μ������� �ܳ��� �����̸鼭 Realtime ���μ��� ������ �ܳ��� ���μ��� �̰�, A �������� ���ʹ� �������� Application�� �����ϴ� ���μ����� �з� �Ͽ����ϴ�.
5.1.1 ARM7 Processor
(1) ARM7TDMI Core
- RISC Architecture (ARM v4T)
- 3 stage pipelining
- Hard macrocell
- 32-bit ARM/16-bit Thumb Instructions
- Unified bus architecture( �����̸� ���� ����)
- ARM720T = ARM7TDMI + MMU + Cache(8KB Unified) + WB + AMBA
- S3C44B0 ��
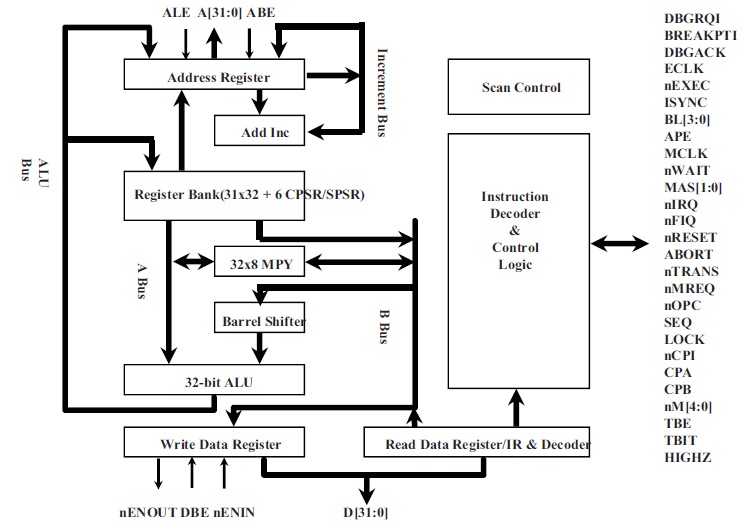
(2) ARM7TDMI Block Diagram
5.1.2 ARM9 Processor
(1) ARM9TDMI Core
- RISC Architecture (ARM v4T)
- 5 stage pipelining ->
Improved clock frequency
- Harvard Bus Architecture
- Simultaneous access to instruction and data memory
- Hard macrocell
- 32-bit ARM/16-bit Thumb Instructions
- ARM920T = ARM9TDMI + Dual Caches + MMUs + WB + AMBA + PA TAG RAM
- S3C2440, S3C2443 ��
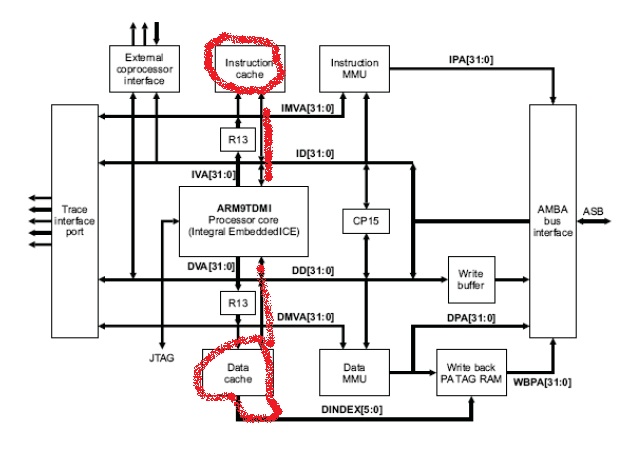
���� ARM7�� �� ���ɾ� ������ ������ ������ ������ �Ǿ� �ִ°��� �˼� �ֽ��ϴ�. ���⼭ �ణ ������ �� ���̴µ���, Write back PA TAG RAM �� ����� ?
�� �� �����ϱ� ���ؼ��� ���� ij�� ���� 2���� ���� ����� �˾ƾ� �մϴ�. Cache���� ������ �ָ� Write�Ҷ�, Write-through ��İ� Write-back ����� �ֽ��ϴ�. Write-through����� ij�� ���� ������ ������Ʈ �ɶ� �� ���� ���ÿ� ������Ʈ�� �Ǵ� ����̰� Write-back ����� ij�ø��� ������ ������Ʈ �Ǿ �ٷ� �� �� �ݿ��� �Ǵ� ���� �ƴ϶� Write back PA TAG RAM ���� ��� ������ �ξ��ٰ� ���� ������ CPU�� ���� �ִ� ���ȿ� �� �� ������Ʈ �ϴ� ��� �Դϴ�. Write Buffer�� Write-throuh ����� ��쿡 Data Cache�� ������ �� �� Write �ϱ� ���� Buffer ������ ���ְ�, Write back PA TAG RAM�� Write-back ����� ��쿡 Data Cache�� ������ ��� �����ϰ� �ִٰ� �� �� Write�� ���ִ� ������ �մϴ�.
5.1.3 ARM11 Processor
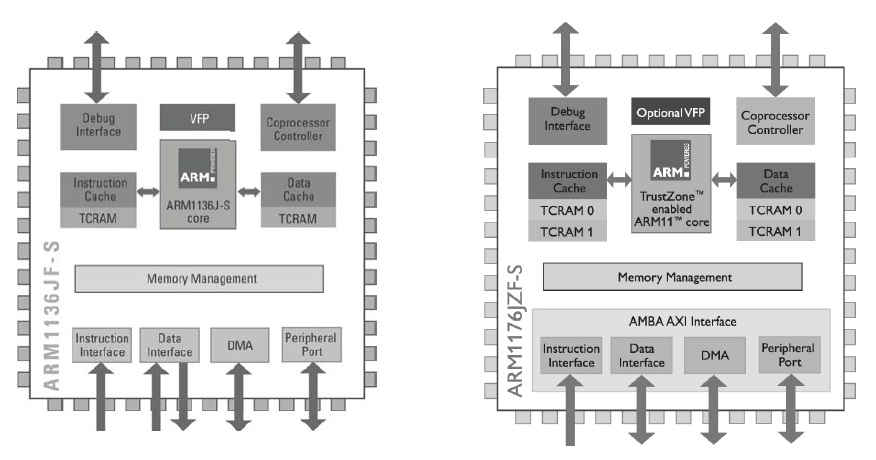
(1) ARM1176JZ(F)-S Core
- ARM v6 Architecture
- Improved Multimedia Performance
2x faster MPEG4 encode/decode
SIMD(Single Instruction, Multiple Data) Instructions : ���� �������� ���� ������ ó���ϴ� ���� ���մϴ�.
- Improved Real-Time Performance
Fast Exception/Interrupt Handling
Vector Interrupt Controller -> Reduced Interrupt Latency
New Stack and Processor Mode Change Instructions
- Improved Memory Interface
Un-aligned Data Access
Mixed-Endian
8 stages pipeline
Higher clock frequency
9 stages pipeline for ARM1152T2(F)-S
Separate load-store and arithmetic pipelines
Branch prediction (static & dynamic)
Return Stack
- Other features
High Performance Integer Processor
Physically-tagged caches
Jazelle technology
VFP (Vector Floating Point)
Non Blocking
HUM (Hit Under Miss)
ARM TrustZone Technology
Thumb-2 Instruction
Intelligent Energy Manger (IEM) Technology
- S3C6400, S3C6410 ..
5.1.4 ARM Cortex Families
(1) A profile (ARMv7-A) : Application Profile
- For sophisticated, high-end applications running open and complex operating systems
- ARM, Thumb, Thumb-2 instruction sets
- S5PC100, S5PV210, OMAP3530 ..
(2)
R profile (ARMv7-R) :
Real-time Profile
- For real-time system
- ARM, Thumb, Thumb-2 instruction sets
(3) M profile (ARMv7-M) :
Microcontroller Profile
- For cost-sensitive and microcontroller applications
- Thumb-2 instruction set only
- STM32F �ø���
�����ӰԵ� ���� ��ǥ�� Cortex �йи��� Profile�� ù��° �̸��� A.R.M ���� ȸ�� �̸��� ���� �ϳ�. �쿬�� ��ġ �ΰ���? ^^
5.2 ARM Processor ����
- Embedded real-time Processor
Embedded real-time systems for storage, automotive body and powertrain,
industrial and networking applications
- Application Processor
Devices running open operating systems including Linux, Palm OS,
Symbian OS and Windows CE in wireless, consumer entertainment and
digital imaging applications
- Secure Processor
Smart cards, SIM cards and payment terminals
���� ���� ���������� �з� �� ���� �ְ����� �ᱹ ���������� ���μ��� ������ ���� ū ������ ���ݴ�� ������ ���Դϴ�. ���� �����Ϸ��� �ϴ� ������Ʈ�� ���� �� �� �ִ� ���� ���� Cost�� ���μ����� ���� �� ���̱� ���� �Դϴ�. ���� ������ Money, Money �ص� �Ѱ� �ְ���. ���⼭ �� �Ѱ��� S/W �������� ���忡�� ������ ���� ������ ���̵��� ���Դϴ�. �������� ARM�� �ش��ϴ� ARM7, ARM9, ARM11 ���μ������� RAM, ROM�� CPU�ܺο� ��ġ ��ŵ�ϴ�. �̷��� ����(CPU, ��ǰ���� �ּҿ� �ʱ�ȭ �ڵ���� Ʋ����)������ �ڵ��� ȣȯ��( ����ϴ� �� ��ũ�� ���� �뷮, ������ ���� �ҽ� ������ �ڵ尡 ����)�� �ſ� �������� ��Ʈ�δ� ���� ���� �ۼ� �ؾ� �մϴ�. �̿� ���ؼ� Cortex-M, R ���������� �ھ���� CPU���ο� RAM, ROM�� ������ �ְ� Address ���� ���� �ھ ����ϴ� CPU���� ��� ���� �ϰ� ���˴ϴ�. ���� �����Ϸ�(���� IDE) ���ؿ��� ��Ʈ�δ��� ���� �� ���� �ֽ��ϴ�. ������ ��κ��� ��� �����Ϸ� ���� �����ڰ� ��Ʈ�δ� �ڵ带 �ۼ����� �ʾƵ� �⺻���� �����ϰ� �ֽ��ϴ�.
6. ARM Architecture
6.1 ARM based system
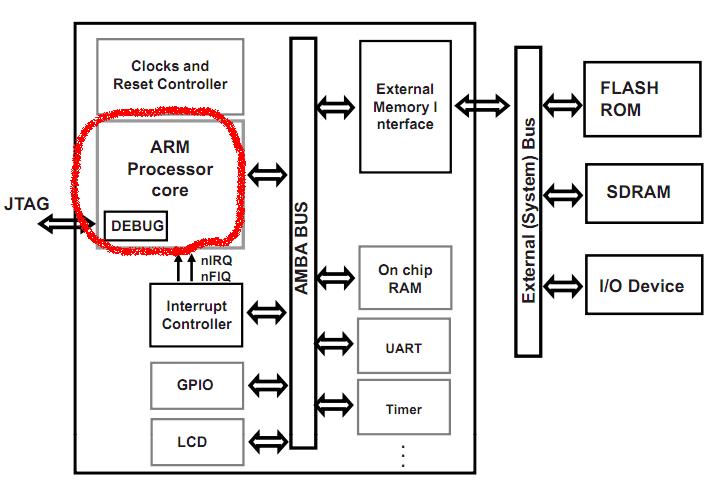
���� �������� ARM Core�� ���� �������� �ƴϰ� ������ �κ��� ARM Core�� �̿��ؼ� ������ CPU�� �� �� �Դϴ�.
6.2 ARM Operating Modes
(1) 7���� Processor Mode�� ����
User, FIQ, IRQ, Supervisor, Abort Mode, Undefined, System Mode
(2) Operating Mode ������ Hardware �� Software�� ���� �մϴ�.
ARM ���μ����� ������ �ΰ� �Ǹ� SVC ��忡�� ������ �ǰ� ���ͷ�Ʈ, �ͼ��� ���� ���ϸ� ��Ȳ�� ���߾ H/W ������ Operating Mode �� ������ �ǰų� S/W �����δ� SWI ���ɾ ���ؼ� SVC ���� ���� �� ���� �ֽ��ϴ�.
ARM Core���� �� �̷��� �������� ���� ��尡 �����ϴ� ���ϱ��? �Ƹ��� ��Ű���� �������� ����Ʈ������ ���ȹ� ������ ���� �ϱ� ���ؼ��� ���Դϴ�. ���� OS ����� Ŀ�� S/W �� ��� ������ ������ ���� �ϵ��� �ϰ�, User ���ø����̼��� ���ѵ� ������ ������ ������ �ϵ��� ���� �Ѵٸ� ���ø����̼� ���μ����� ��� ������ ���� User Mode ���� ���� ��Ű�� ������ Ŀ�ι� ����̽� ����̹����� ������ �ִ� ������ ���(Supervisor, System Mode)���� ���� ��Ű���� �� �� �ֽ��ϴ�. ���� �̷��� ����� S/W �����ε� ������ �Ұ����� ���� �ƴ����� ������ ���ؼ��� �� ���� ����� �ʿ��� ���Դϴ�.
| Mode | Description | |
| Supervisor(SVC) | Entered on reset and when a Software Interrupt instruction (SWI) is executed | Privileged modes |
| FIQ | when a fast(urgent) interrupt occurred | |
| IRQ | when a normal interrupt occurred | |
| Abort(ABT) | when a data fetch or instruction prefetch aborts | |
| Undef(UND) | when an undefined instructions is executed | |
| System(SYS) | Privileged mode using the same registers as User mode | |
| User(USER) | Mode under which most Applications / OS tasks run | Unprivileged mode |
- CPSR Register�� Privilege Mode ���� S/W �� ���� ����, User Mode���� �����ϸ� Undefined Instruction Exception �� �� �մϴ�.
- ARM Core�� ������ �ΰ��Ǹ� ���ʿ��� Supervisor ���� ������ �մϴ�. ó���� ������ ���� ���� ������ �ϸ� Privilege Mode�� ��ȯ �� ����� ������.
- �� ���� ������ Stack������ Banked Register ������ ������ �ֽ��ϴ�.
������ �������� ��尡 ���� ������ ���� � ��带 �ݵ�� ��߸� �ϴ� ��Ģ�� �ִ� ���� �ƴϰ�, �Ϲ� ���� �ǰ� ������ ���Դϴ�. ��κ� OS�� ����� �ʴ� �ܼ��� �߿��� ������ �ڵ���� �ʱ� ���ý� ������ Supervisor �� ����ϴ� ��쵵 ���� �ֽ��ϴ�. ���� ǥ�� ���� mode�� ũ�� Privileged modes�� Unprivileged mode �� ���� �� �ֽ��ϴ�. 2���� mode ������ ���̴�
(1) Privileged Mode (Ư�� ���)�� IRQ�� FIQ���� Interrupt�� ��� ���� ������ ���� ���� �� �� �ֽ��ϴ�.
(2) Privileged Mode�� �ڱ�鳢�� ���� Mode ������ ��������� ���� �մϴٸ�, Normal Mode�� �ڱ� ������ Privileged Mode�� Mode�� ������ �Ұ��� �մϴ�.
�װ��� ���� ���, SYS ↔ FIQ, IRQ ↔ SVC�� ���� Privileged Mode → Normal Mode (USR)�� ����������, USR → Privileged Mode���� ������ �Ұ��� �մϴ�. ���� �߿��� ����Դϴ�. ����� �ּ���. �ᱹ Privileged Mode�� �ڱ�� �ڴ�� Mode�� ���� �� �����Ӱ� �Դ� ���� �� �� ������, USER Mode�� �������� �ʽ��ϴ�.
FIQ, IRQ, Abort, Undef ���� ������ �忡�� ���� �ڼ��� ���� �ϵ��� �ϰ� System mode, User mode, Supervisor (SVC) mode �� ���ؼ� ���� ���� �ϵ��� �ϰڽ��ϴ�. User Mode�� Application Program�� Execution �ϴ� Mode�̰�, System Mode�� Privileged Operating system task�� ����Ǵ� mode�̰�, Supervisor mode�� ��ȣ�� Operating system(Ŀ�ε�) ���� �ַ� ���Ǵ� mode �Դϴ�.
6.3 ARM Registers
6.3.1 Normal Registers
�� �ð��� �������ʹ� �ӽ÷� ������ �����ϰ�, ���꿡 ���ǰ�, ���α� ��� ���Ǵ� ���ټӵ��� ������� �ӽ� �����ġ ��� ������ �Ͽ����ϴ�.
ARM Core�� �� �����ϱ� ���ؼ��� ARM Core�� ����Ǿ� �ִ� �⺻ Register���� ��� �����Ǿ� �ְ�, ���Ǵ����� �� �˾ƾ� �մϴ�. Register���� Core�� ����� �� �ִ� ���� ��ü �߿��� ���� ���� �ӵ��� �ڶ��ϸ�, ARM�� ������ ��� Register���� ��� ����ϴ³Ŀ� ���� ������ ���� �� �� �ֽ��ϴ�. �ᱹ ARM ���μ����� ��� �Ѵٴ� ���� �Ʒ� Register���� ������ ������ �ϸ� �� �� �� ���ε� �ֺ� ��ġ���� �����ϱ� ���ؼ� Load, Store �ϴ� ���Դϴ�.
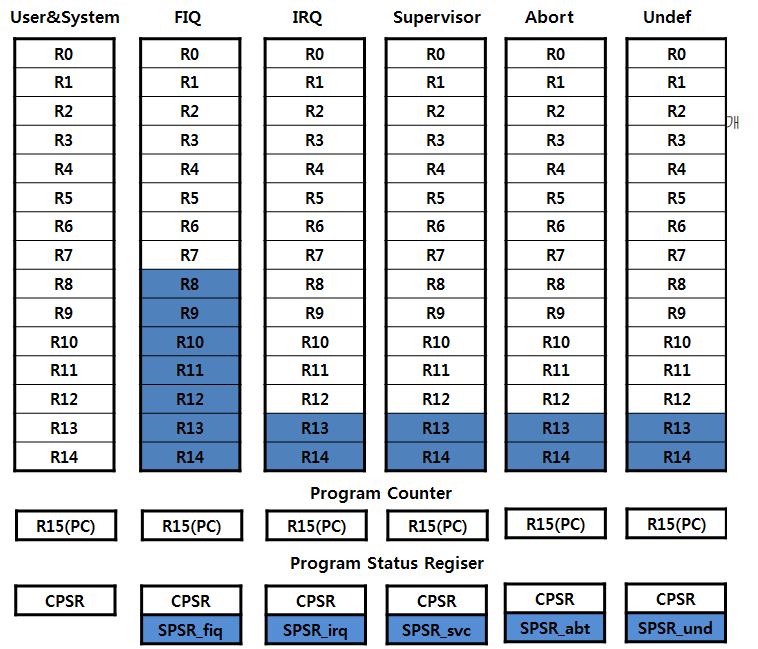
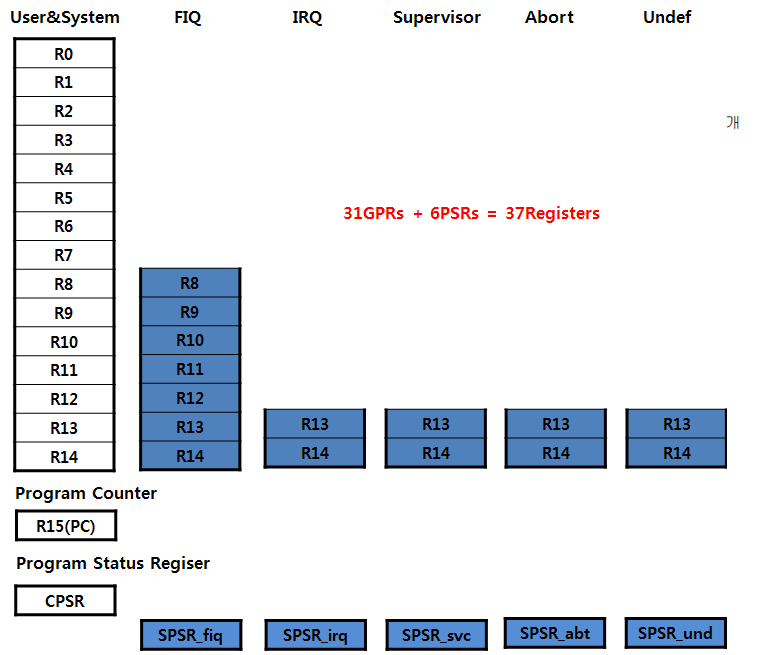
���� �������� ���� ���� ARM ���۸�庰�� ������ �Ǿ� �ְ�, ���� ��忡 ���� �Ķ��� �ڽ��� �ѹ� �� ������ �Ǿ� �ִ°��� �� �� �ֽ��ϴ�. �Ķ��� �ڽ��� �Ǿ� �ִ� �������͵��� ��ũ�� �������Ͷ�� �մϴ�. ���ϱ� �����ڽ��� �������ʹ� ���� ��忡 ��� ���� �������� ���Ǿ����� �Ķ��� �ڽ��� ��ũ��� �������ʹ� ���� ��庰�� ���������� ��� �����ϴٴ� ���Դϴ�. ���θ� �ؼ��� �� ���ذ� ���� ������.
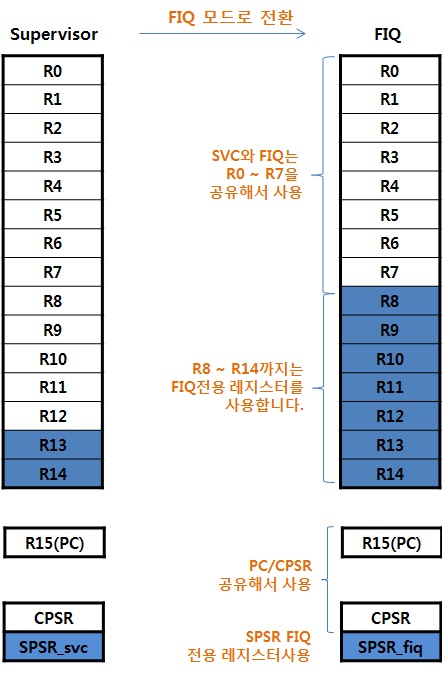
�Ѱ��� ���� �� ������ �ϵ��� �ϰڽ��ϴ�. CPU�� ���� ������ �ΰ��Ǿ� SVC ���� ������ �ϴٰ� FIQ���ͷ�Ʈ�� �� �Ͽ��� ��� �������� ���´� �Ʒ��� �����ϴ�. FIQ�� ��ȯ�� �Ǹ� R8 ~ R14������ FIQ���� �������Ͱ� ����� �˴ϴ�. �̸��� FIQ��忡�� R8 ~ R14�� SVC��忡���� R8 ~ R14�ʹ� �ٸ� �������� �Դϴ�. �� SVC��忡�� FIQ�� ���� �Ǿ����� ����(Context) ������ ���ؼ� R8 ~ R14�� ������ ���� �ʾƵ� FIQ��忡�� R8 ~ R14�� ������� ����ص� �˴ϴ�. CPSR�������͵� FIQ, SVC ��忡�� ���� ���� �մϴ�.
���⼭ ����(Context)�̶�� �� �����µ�, �����̶�� �ǹ̰� �����ϱ��?
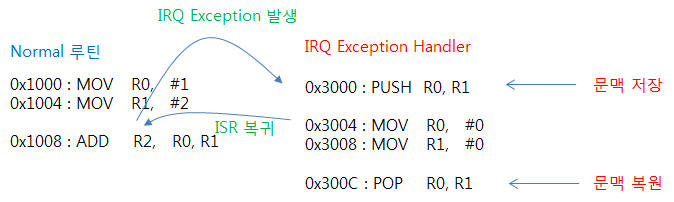
S/W ���忡�� ������ ���� ���α��� ������� ������ �Ǵٰ� � ������ ISR�� ���� �ϸ� ������ ���α� ������ ��� �ߴ��ϰ� ISR ���� ��ƾ���� �̵��ϰ� �˴ϴ�. �̶� ISR���� ��ƾ���� �̵��� �ϴ°��� ������ ��ȯ�̶�� �ϴµ��� ISR ���� ��ƾ���� �̵��ϰ� ���� ISR���� ��ġ�� ������ ���α��� ����ؼ� ������ �Ǿ�� �ϴµ� ���� ISR���� ��ƾ���� Ư�� �������͵�(R0 ~ R12)�� ����Ͽ��ٸ� �� ������ ������ �Ȼ��¿��� ������ ���α��� ����Ǵ� ��ġ�� ���ƿͼ� ��� ������ �ϰ� �Ǹ� ������ �ʴ� ����� ���� �� �ֽ��ϴ�. �̷��� ���� ������ ������ ������ ���ؼ� ISR ���� ��ƾ���� �̵��� �ϱ� ���� ISR���� ���� �������͵��� ���ÿ� �ӽ÷� ������ �ϰ� ISR��ƾ�� ���������� ���� ���ÿ� ����Ǿ� �ִ� �������͵��� �ٽ� �������� �ݴϴ�.
ISR ���� ��ƾ���� �̵��ϴ� ���� ������ ��ȯ�̶� �ϰ�
ISR ��ƾ���� ��� �� �������͵��� �ӽ÷� ���ÿ� �����Ͽ��ٰ� ISR��ƾ�� ������ ��ġ�� �����ϱ����� ������ �ξ��� �������͵��� ������ ������ �����ϴ� ���� ���� ���� �̶�� �մϴ�.
�� ~~ ������ ��� ������ ���ҳ�. �̰͵� �����ϰ� ���� �� �ٽ� ������ �ϵ��� ������.
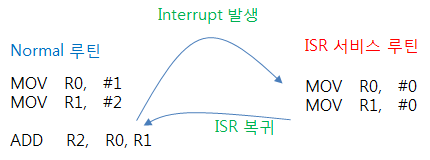
���� ������ "MOV R1, #2" ���� ���Ŀ� Interrupt�� ������ �ʾҴٸ� R2���� #3�� �� �־�� �ϳ� ISR ���� ��ƾ���� R0, R1�� #0���� �����Ͽ� ISR ��ƾ ���� �� R2���� #0�� �� �ֽ��ϴ�. �̰��� ������ ���ϴ� ���μ��� �帧�� �ƴմϴ�.
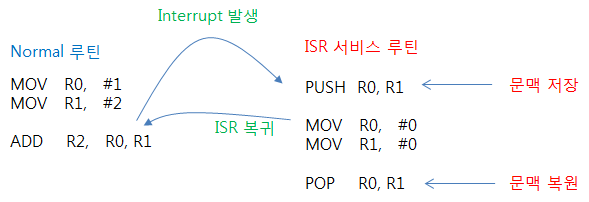
���� �������� ������ �̿��ؼ� ISR ���� ��ƾ���� ���� ����(PUSH)�� ����(POP)�� �ϰ� �־�
Interrupt�� ���Ͽ� ������ȯ(Context Switch - ISR ���� ��ƾ���� �̵�)�� �Ͼ �Ŀ���
���� �Ͽ����� R2���� ���������� #3�� �� �ֽ��ϴ�.
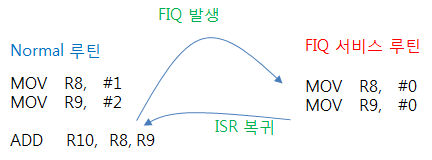
���� ������ FIQ ���ͷ�Ʈ�� �� ���� ����� ���� �Դϴ�. R10�� ����Ǵ� ���� ���ϱ�� ?
������ #3�� �� �ְ���. �ֳ��ϸ� FIQ ��忡�� ���Ǵ� F8 ~ R14�� ��ũ�� �Ǿ� �־ Normal��ƾ���� ���Ǵ� R8 ~ R12�ʹ� ������ �������� �̱� ������ FIQ ��忡�� R8 ~ R12 �� ��������� ������ ���� �ʾƵ� �Ǵ°� �Դϴ�. ������ FIQ ��忡���� R0 ~ R7 �� ����Ѵٸ� ���� ����� ������ �ؾ� ������.
���ذ� ���ó���. ARM ���� 3���� ��쿡 ���ؼ� ���� �ڵ带 �Է��ؼ� ��Ʈ �غ����� �ϼ���. ���������� �ڵ带 �ۼ� �Ҷ� ���� �߿��� ���� �Դϴ�.
6.3.2 Special Registers
ARM �������͵��߿��� R0 ~ R12 ������ �Ϲ� ����, �ӽ� ���� ��ҵ����� ����� �ǰ� R13 ~ R15������ ���� Ư���� �ǹ̸� ������ �ֽ��ϴ�.
���� CPSR(Current Program Status Register) �̶�� ���� �������͵� �ֽ��ϴ�.
(1) R13
- Stack Pointer(SP)
- ARM ���� ��庰�� ���� ������ ����Ű�� �ֽ��ϴ�.
- R13(SP)�� ARM ���� ��庰�� ��ũ�� �Ǿ� �ִ� �������� �Դϴ�.
(2) R14
- Link Register(LR)
- �Լ� ȣ��� ���ϵ� �ּҸ� ������ ����
- R14(LR)�� ARM ���� ��庰�� ��ũ�� �Ǿ� �ִ� �������� �Դϴ�.
�Լ� ȣ��� ������ �ּҸ� �����ϱ� ���ؼ� �������� ���� 1���� �Ҵ��ߴµ� � ������ ������� ?
������ �б�(BL)�ϴ� ��찡 �ƴ� �ѹ��� �б�(BL) �ϴ� �����, �Լ� ���� ������ �ּҷ� �����Ҷ� ������ ������� �ʰ� R14 �������� ��������ν�, �� �ӵ����� ������ ��� �Ǵ� ���Դϴ�.
* ���� ���� = ���� �� ���� = ����
�������ʹ� CPU�� ���� �� �� �ִ� ���� ���� ������ �� ���� ���� �̶�� �����ϸ� �ǰڽ��ϴ�.
(3) R15
- Program Counter(PC)
- PC�� ����Ͽ� ���� ���ɾ Fetch
- R15(PC)�� ���μ��� ��忡 ������� �ϳ��� R15�� ������ ����( ARM ���۸�庰�� ��ũ�� �Ǿ� ���� �ʽ��ϴ�.)
(4) CPSR
- Program Status Register (CPSR)
- CPSR�� ARM ���� ��庰�� ��ũ�� �Ǿ� �ִ� �������� �Դϴ�.
-
���μ��� ��尡 ������ �Ǹ� �ϵ���������� ����DZ� ������ CPSR ���纻�� SPSR( Saved Program Status Register - CPSR�� ��ũ�� ��������) �� ������ �˴ϴ�.
- User, System ��带 �����ϰ� �� ���� ��帶�� �ϳ��� ���� �մϴ�.
�Ʒ� ���� �� ������ ���̱�� ������ CPSR�� 32bit ���������� ���Դϴ�. ���ݺ��� �ϳ��� ������ ������ ������.
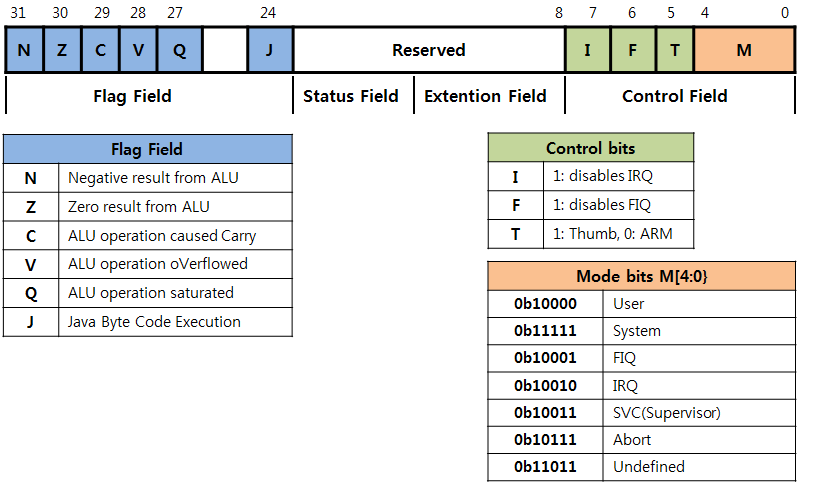
�տ� NZCVQ�� Flag field��� �ؼ�, ���� ������ �Ŀ� set�Ǵ� register�Դϴ�. �� field�� ��� ó���� ALU�� ���� ����� ���¸� ��Ÿ���ϴ�.
1) N : Negative - �������� ���̳ʽ��� ��쿡 set �˴ϴ�.
2) Z : Zero - �������� 0�� ��쿡 set �ǿ�.
3) C : Carry - �������� �ڸ� �ø��� ���� ��쿡 set �˴ϴ�.
4) V : oVerflow : ������ ����� overflow ���� ��쿡 set�Ǵµ�, Over flow��°� ��ġ�� ���ϱ� ���� ������ �ϴ� Range���� ��� ���� ū ��찡 �� ��쿡 �ش�˴ϴ�.
�̰��� �ʿ伺�� ARM�� ö���̱ �ѵ�, ARM core�� Opcode�� Memory���� �������� ���� (Fetch) �̸� ������ �����ϴ� ���� �ƴ϶� Condition flag�� NZCV�� ���� �ٷ� �� opcode�� �������� ���� �������� ������ ������ �� �ֽ��ϴ�.
Default�� AL "Always" , condition�� ������� �� ���� �ϴ� ���Դϴ�. Control Field�� ���ؼ��� �켱 ������� ������ �ϰ�, ARM Instruction���� ���� �ڼ��� ���� �� ������ �ϵ��� �ϰڽ��ϴ�.
Control Field�� 7�� ��Ʈ�� "I" �� 1�� ����ŷ�� �ϸ� ���ͷ�Ʈ�� �� ���� �ʽ��ϴ�. ���ͷ�Ʈ�� �� ���̱� ���ؼ��� 0���� Clear �ؾ� �մϴ�.
���������� Control Field�� 6�� ��Ʈ�� "F" �� 1�� ����ŷ�� �ϸ� Fast ���ͷ�Ʈ�� ���� ���� �ʽ��ϴ�. Fast ���ͷ�Ʈ�� �� ���̱� ���ؼ��� 0���� Clear �ؾ� �մϴ�. ���������� 5�� ��Ʈ�� "T" ��尡 �ֽ��ϴ�. ARM Core�� �ʱ� ���ýÿ��� ������ ARM ���(5�� ��Ʈ�� "T" �� 0���� ���� ��)���� ������ �ǰ� ��쿡 ���� Thumb mode�� ��ȯ�� �� ���� �ֽ��ϴ�. Thumb mode�� ���ؼ��� ������ �忡�� �ٽ� ������ �ϵ��� �ϰڽ��ϴ�. �������� ARM���� 7������ ���� ��尡 �ִٰ� �Ͽ��µ�, �� ���� ���鿡 ���� ���� ǥ�� �� CPSR�� ���� 5bit(Mode bits)�� ������ ������ �˴ϴ�.
6.4 ARM Exceptions
Exception �̶� ������ ���? �������� �ǹ̷δ� "����" ��� �Ǿ� �ֽ��ϴ�. ������ �츮�� ���� ARM�� �����ϰ� �ֱ� ������ ���� ARM ���� ǥ���� �Ѵٸ�,
�ܺ� ��û�̳� ���α� ������ ���� �ڵ��� �������� �帧�� ����� ���� �̶�� ������ �ϰڽ��ϴ�. �ڵ���
�������� �帧�� ����ٴ� �̰���� PC(R15)�� �ּҰ� �ٲ�� �Ǵ� ���Դϴ�. �Ʒ� ���� Exception �߿��� IRQ ���� ��Ȳ�� ������ ��쿡 Exception ó�� �帧�� �⺻���� ���� �Դϴ�.
PC�� 0x1004�� �����ϰ� ���� IRQ ���� ��Ȳ�� ������ �ϰ� �Ǹ� �ڵ��� �������� �帧�� ��� �ߴ��ϰ� IRQ ���ܻ����� ó���� �־�� �մϴ�.
���⼭ IRQ���� ��Ȳ�� ó���� �ִ� ��ƾ�� Exception Handler�ϰ� �մϴ�. Exception Handler ������ 7���� ���� ��Ȳ(���� �������� IRQ ����)�� �´� ������ ó���� �ϰ� Exception�� ���ϱ� �������� �����ϸ� �˴ϴ�. Exception Handler���� �Ѱ��� ���� �� ������ Exception�� ���ϱ� �������� �����ϱ� ���� �ݵ�� ������ �����ϰ� ���� �ؾ� �մϴ�.
����
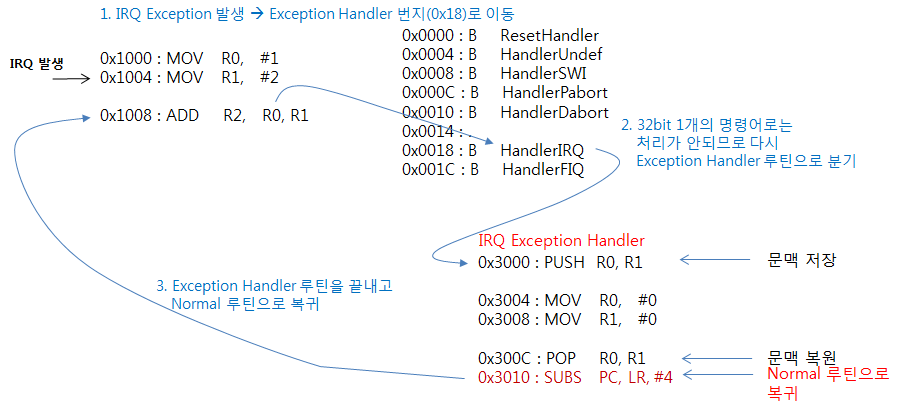
���� �������� ���ǻ� IRQ ���� ó���� ���ؼ� 0x3000������ �ڵ��� �帧�� ����Ǿ����� ������ ARM������ IRQ �� ���ϸ� �ڵ��� �帧��(PC) 0x00000018 �� H/W ������ ������ �ǰ� 0x00000018 ������ �ٽ� ������ ���� ������ ó���ϴ� Exception Handler �Լ��� �б��ϴ� ������� ó���� �˴ϴ�.
0x00000018 ������ Exception Vector��� �ϰ�
ARM������ 7������ Excepton�� �����ϴµ� �̷��� ���� ��Ȳ�� ������ �ϸ� �� ���� ��Ȳ�� ���� �̸� �Ҵ�� �ּҿ� �ִ� ARM ���ɾ ������ �˴ϴ�.
�Ʒ� ǥ�� ARM������ 7������ Excepton �� ���Ͽ� �ּҿ� �� Exception�� �Ҵ�� ������ Vector �ּ� �Դϴ�.
| Exception Type | Priority | Mode | Vector | High Vector |
| Reset | 1 | Supervisor | 0x00000000 | 0xFFFF0000 |
| Undefined Instruction | 6 | Undefined | 0x00000004 | 0xFFFF0004 |
| SWI | 6 | Supervisor | 0x00000008 | 0xFFFF0008 |
| Prefetch Abort | 5 | Abort | 0x0000000C | 0xFFFF000C |
| Data Abort | 2 | Abort | 0x00000010 | 0xFFFF0010 |
| Reserved | 0x00000014 | 0xFFFF0014 | ||
| IRQ | 4 | IRQ | 0x00000018 | 0xFFFF0018 |
| FIQ | 3 | FIQ | 0x0000001C | 0xFFFF001C |
Exception�� ������ �տ��� ����� ARM ���� ������ ���踦 ȥ���ؼ��� �ȵ˴ϴ�. ���� ��Ȳ�� ���ϸ� �� ���� H/W ������ ARM ���� ��尡 ������ �Ǵ� ���Դϴ�. Priority�� ���� �ð��� �ټ��� ���� ��Ȳ�� �����ϰ� �Ǹ� �켱������ ���� ���� ���� ���� �ϰ�����.
���� Vector�ּҴ� 0x00 �������� 32bit(4Byte)������ ���� �ϴµ�, High Vecotr�� ������ �Ǹ� ���� �ּҰ� 0xFFFF0000�� �˴ϴ�. Windows CE������ High Vector�� ����Ѵٰ� �մϴ�.
(1) Reset
ARM Core�� ������ �ΰ��ϴ� ��� ��
| Reset ���� CPSR, Register ���� | |
| R14_svc | UNP |
| SPSR_svc | UNP |
| CPSR[4:0] - ARM ���� ��� | Supervisor Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=1, T=0 |
| PC - Vector Address | 0x00000000 |
(2) Undefined Instruction
ARM Processor ���� ���ǵ��� ���� ���ɾ� ���� ���� �ϴ� ��쿡 ��
| Undefined Instruction ���� CPSR, Register ���� | |
| R14_und | Address of the undefined instruction + 4 |
| SPSR_und | CPSR |
| CPSR[4:0] - ARM ���� ��� | Undefined Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=unchanged, T=0 |
| PC - Vector Address | 0x00000004 |
| Return | MOVS PC, LR |
Return �̶�� �Ǿ� �ִ� ���� Exception Handler ������ ��ġ�� ������ ���α� �帧���� �����Ҷ�, R14�� H/W������ ���� ���� �ּҿ� ���� ������ �˴ϴ�. �� Exception ������ ���� R14�� ���� ���� �ּҰ� �� ���Ƿ� ���� �ؾ� �մϴ�.
(3) Software Interrupt
�� Ư�Ǹ�忡�� Ư�� ���� �����ϱ� ���ؼ� Software Interrupt ���ɾ ������ ��� ��
| Software Interrupt ���� CPSR, Register ���� | |
| R14_svc | Address of the SWI instruction + 4 |
| SPSR_svc | CPSR |
| CPSR[4:0] - ARM ���� ��� | Supervisor Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=unchanged, T=0 |
| PC - Vector Address | 0x00000008 |
| Return | MOVS PC, LR |
(4) Prefetch Abort
Illegal �ּҿ��� ���ɾ �����ͼ� ���� �Ϸ��� ��쿡 ��
| Prefetch Abort ���� CPSR, Register ���� | |
| R14_abt | Address of the aborted instruction + 4 |
| SPSR_abt | CPSR |
| CPSR[4:0] - ARM ���� ��� | Abort Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=unchanged, T=0 |
| PC - Vector Address | 0x0000000C |
| Return | SUBS PC, LR, #4 |
(5) Data Abort
Illegal �ּҿ� Data�� ���ų� �б� ������ �õ��ϴ� ��쿡 ��
| Data Abort ���� CPSR, Register ���� | |
| R14_abt | Address of the aborted instruction + 8 |
| SPSR_abt | CPSR |
| CPSR[4:0] - ARM ���� ��� | Abort Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=unchanged, T=0 |
| PC - Vector Address | 0x00000010 |
| Return | SUBS PC, LR, #8 (re-executed) SUBS PC, LR, #4 (not re-executed) |
(6) IRQ
ARM Processor �ܺο��� ���ͷ�Ʈ�� ��û�� ��쿡 ��
| IRQ ���� CPSR, Register ���� | |
| R14_irq | Address of the next instruction to be executed + 4 |
| SPSR_irq | CPSR |
| CPSR[4:0] - ARM ���� ��� | IRQ Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=unchanged, T=0 |
| PC - Vector Address | 0x00000018 |
| Return | SUBS PC, LR, #4 |
(7) FIQ
ARM Processor �ο��� Fast ���ͷ�Ʈ�� ��û�� ��쿡 ��
| FIQ ���� CPSR, Register ���� | |
| R14_fiq | Address of the next instruction to be executed + 4 |
| SPSR_fiq | CPSR |
| CPSR[4:0] - ARM ���� ��� | FIQ Mode |
| CPSR[7:5] - ���ͷ�Ʈ ���� | I=1, F=1, T=0 |
| PC - Vector Address | 0x0000001C |
| Return | SUBS PC, LR, #4 |
Exception Handler�� �����ϰ� ������ ���μ��� �帧���� �����ϴ� Return ���ɾ��� �������� SUBS, MOVS ������ ���� "S" ���̻簡 ���� �ٽ��ϴ�.
"S" ���̻��� �ǹ̴� Destination �������Ͱ� ���� PC(R15) ��� SPSR�� CPSR�� ���� �϶�� �ǹ��� ���̻� �Դϴ�. ���� �̷��� ������ H/W ������ �̷�� ���ϴ�.
�Ʒ� ���� IRQ ���� ó���ϴ� ���� �Դϴ�. ������ ����ߴ� ������ ���� ���ñ� �ٶ��ϴ�.
���α��� �������� �帧���� 0x1004���� ���ɾ� ó���߿� IRQ ���ܰ� ���ϸ� 0x1004 ������ ���ɾ� ������ �Ϸᰡ �� ���Ŀ� IRQ ������ Exception Vector�� 0x0018������ PC�� �̵��� �ϰ� 0x0018�������� ������ IRQ ����ó�� �ڵ鷯 �Լ��� �ִ� ������ �ٽ� �̵��� �Ѵ���
����ó���� �Ϸ��ϰ� �ٽ�
IRQ ���ܰ� ���� ���� ������ ���ɾ �ִ� ������ "SUBS PC, LR, #4" �� ���ؼ� �����ؼ� IRQ ���ܰ� ������ ������ó�� ����ؼ� Normal ��ƾ�� ������ �˴ϴ�.
������ �Ѱ��� ������ ���߸� ���� �ִµ�, IRQ ���ܰ� �Ͼ�� H/W �����δ� ������ ���� ���� ���� �մϴ�.
(1) CPSR ��� : SPSR_irq = CPSR_svc
(2) ARM ���� ��ȯ( ���ܻ�Ȳ������ �� ARM ���� ������ ��) : CPSR.T = 0
(3)
CPSR MODE �� IRQ ���� ���� : CPSR[4:0] = 0b10010
(4) IRQ ��� ����ŷ(���ͷ�Ʈ�� Disable ��) : CPSR.I = 1
(5) R14_irq = PC + #8
(6) PC = 0x18( IRQ Vector address)
(5)�� �� LR(R14)�� PC + #8�� ���� ������ Ư�� ������ ���ɾ ����ɶ� IRQ�� ���� �ϸ�
Execution - Fetch - Decode �� Pipe line ���� ���� Execution �ܰ迡�� ���� PC�� ���� �������� ���ɾ��� Fetch(+4), Decode(+8) �ܰ谡 ������ �ǰ� �ֱ���� LR���� PC + #8 ������ ���� ��� ���� �˴ϴ�. ������ IAR, KEIL, ADS ���� �����Ϸ� ����� IRQ���� LR�������� ���� �����غ��� LR�� ���� PC + #8 �� �ƴϰ� LR = PC �� ���� �����ϴٰ� ǥ�� �˴ϴ�. �̰��� �����Ϸ� ������� ȥ���� ���ϱ� ���ؼ� �̷��� ǥ�ø� �ϰ� �ִ°� �����ϴ�.
6.5 Exception �� Interrupt�� ����
Exception��
Interrupt�� ������ �ٸ����. ��쿡 ���� ����� �ǹ� �ϼ��� �ֽ��ϴ�. ������ ��� �ٸ����� �ֽ��ϴ�.
(1) Exception
- Ư�� ���ɾ� ��� ���� ������ ��
- Ŭ�Ͽ� ���� ������ ���� : Exception�� �ַ� Core���ο��� ���ϱ� ������ Core�� Ŭ���� ���������� ���� �մϴ�.
- �� ���� ����, ����� �ߴ���, divide by zero... ��
- �а� �����ϸ� Exception�� IRQ�� �����Ѵٰ� �����ص� �˴ϴ�.
(2)
Interrupt
- Processor �� ���ɾ� ����� ������� Processor �ܺο��� �ַ� �� --> Ŭ�Ͽ� �� ������ �� �Ҽ��� ����
6.6 ARM������ Interrupt system
ARM Cortex�ø��� ������ �������� ARM Core���� ���ͷ�Ʈ�� �� �帱 �� �ִ� �����
IRQ, FIQ 2���� �ۿ� �����ϴ�.
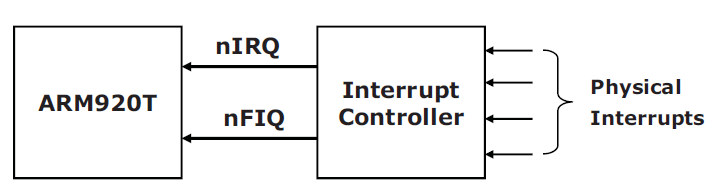
���� ���� ARM9 Core�� ���ͷ�Ʈ ������ �Դϴ�. Interrupt Controller �� Physical Interrupts(UART, I2C ��) �ҽ��� ARM Core ������ ������ �ƴմϴ�. Interrupt Controller �� Physical Interrupts �κ��� ARM Core�� �̿��ؼ� ������ S3C2440���� CPU ���� �Դϴ�. �ٽ��ѹ� �����帮���� ARM Core���� IRQ�� FIQ�ĸ��� �� ���� �� �ֽ��ϴ�. Interrupt Controller�� CPU Vendor�� ���ؼ� �ٸ��� ������ �ɼ��� �ֽ��ϴ�.